ЧАСТИНА 1. ЕЛЕМЕНТИ ЕЛЕКТРОНИХ СИСТЕМ
Електронна система складається з електрично зв'язаних між собою пасивних компонентів (резисторів, конденсаторів і котушок індуктивностей) та активних компонентів - напівпровідникових приладів. В інтегральній мікросхемі активні і пасивні компоненти складають єдине ціле (інтегральний прилад). У силовій схемі напівпровідниковий прилад - конструктивно самостійний елемент (дискретний прилад).
Напівпровідникові прилади належать до твердотільних пристроїв так як їх функціонування ґрунтується на використанні властивостей напівпровідників.
В електронному пристрої напівпровідниковий прилад виконує дві основні функції:
1. замикає і розмикає коло електричного струму, тобто працює як ключ;
2. забезпечує лінійне посилення електричного сигналу, тобто працює як підсилювач.
Відповідно до цього розділяються ключові та підсилювальні режими експлуатації напівпровідникових приладів. У ключовому режимі прилад має два статичних стани: замкнутий - опір приладу близький до нуля, і розімкнутий - опір приладу великий. У підсилювальному режимі напівпровідниковий прилад забезпечує лінійну передачу сигналу: вихідний сигнал цілком повторює форму керуючого (вхідного) сигналу, але має велику (посилену) потужність.
По функціональних можливостях виділяють три основних класи напівпровідникових приладів: діоди, транзистори та тиристори.
Діод - це електричний «вентиль» тобто прилад, що забезпечує односпрямовану передачу електричного сигналу. Його можна вважати некерованим ключем.
Транзистор - керований напівпровідниковий прилад, що може працювати в електронній схемі як у ключовому, так і підсилювальних режимах. Це універсальний напівпровідниковий прилад інтегральних та силових схем.
Тиристор - керований напівпровідниковий прилад, що використовується тільки в ключовому режимі насамперед у силових виконавчих пристроях.
РОЗДІЛ 1. ХАРАКТЕРИСТИКИ ТА РЕЖИМИ РОБОТИ ЕЛЕМЕНТІВ НАПІВПРОВІДНИКОВИХ ПЕРЕТВОРЮВАЧІВ ЕЛЕКТРИЧНОЇ ЕНЕРГІЇ
1.1. Силові напівпровідникові елементи
Класифікація силових напівпровідникових елементів, яка історично склалася на шляху їх розвитку представлена на рис.1.1.
Рис. 1.1 Класифікація силових напівпровідникових приладів
Далі більш детально розглянемо основні силові напівпровідникові прилади зазначені на рис.1.1.
1.1.1. Діоди
Напівпровідниковий діод – прилад, що має два зовнішніх виводи, та містить один p-n перехід. Зовнішні виводи називають анод (А) та катод (К) - рис.1.2, а, б. Існують різні типи діодів, графічні зображення деяких з них наведено на рис.1.2, в.
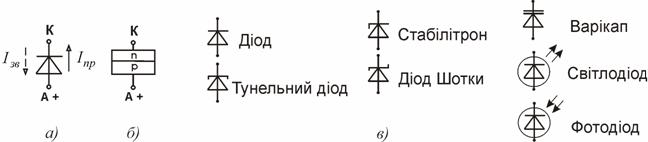
Рис. 1.2 Напівпровідниковий діод
а) графічне позначення; б) структура; в) графічні зображення деяких типів діодів
Фізично силовий діод являє собою p-n
перехід, побудований на базі, наприклад, кремнієвої структури з різними типами
провідності. Струм, що протікає в напрямку анод – катод, називається ![]() прямий струм, а в напрямку катод – анод
прямий струм, а в напрямку катод – анод ![]() зворотній струм.
зворотній струм.
На рис.1.3 зображено статичну (а) та динамічну (б) вольт-амперну характеристики (ВАХ) напівпровідникового діода.
Рис. 1.3 ВАХ напівпровідникового діода:
а) статична характеристика; б) динамічна характеристика
На динамічній характеристиці (рис.1.3, б) можна виділити такі інтервали:
1 – діод вимкнений ![]() ;
;
2 – до діода прикладена пряма напруга, він відкривається;
3 – діод відкритий;
4 – до діода прикладена зворотна напруга, він
закривається протягом часу ![]() ;
;
5 – діод закритий, до нього прикладена зворотна напруга.
Основні параметри діодів, та їх позначення.
Постійна пряма напруга ![]() постійна
напруга на діоді при заданому прямому струмі.
постійна
напруга на діоді при заданому прямому струмі.
Постійна зворотна напруга ![]() постійна
напруга прикладена до діода у зворотному напрямку.
постійна
напруга прикладена до діода у зворотному напрямку.
Постійний прямий струм ![]() постійний
струм, що протікає через діод у прямому напрямку.
постійний
струм, що протікає через діод у прямому напрямку.
Постійний зворотний струм ![]() постійний
струм, що протікає через діод у зворотному напрямку при заданій зворотній
напрузі.
постійний
струм, що протікає через діод у зворотному напрямку при заданій зворотній
напрузі.
Середній прямий струм ![]() прямий
струм, усереднений за період.
прямий
струм, усереднений за період.
Середній зворотний струм ![]() зворотний
струм, усереднений за період.
зворотний
струм, усереднений за період.
Диференціальний опір діода ![]() відношення збільшення напруги на діоді до збільшення його струму.
відношення збільшення напруги на діоді до збільшення його струму. ![]()
Максимально допустимі параметри: До них відносяться всі перераховані вище, але з максимально допустимими рівнями напруг та струмів, перевищення яких призводить до виходу приладу з ладу. Необхідно відзначити, що по максимально допустимих параметрах вибираються діоди для роботи в пристроях і визначаються максимальним допустимим значенням параметра, з індексом “max”.
Імпульсний діод — різновид напівпровідникових діодів, призначених для роботи в швидкодіючих імпульсних схемах. Імпульсний діод має малу бар’єрну ємність та малий час відновлення зворотного опору. Бар’єрна ємність – ємність p-n переходу напівпровідникової структури.
Для імпульсних діодів використовують наступні параметри:
Імпульсна пряма напруга ![]() пікова
пряма напруга на діоді при заданому імпульсі прямого струму.
пікова
пряма напруга на діоді при заданому імпульсі прямого струму.
Імпульсна зворотна напруга ![]() пікова
зворотна напруга на діоді, включаючи як однократні викиди, так і періодично
повторювані.
пікова
зворотна напруга на діоді, включаючи як однократні викиди, так і періодично
повторювані.
Загальна ємність ![]() ємність, обмірювана між виводами діода при заданих напрузі й частоті.
ємність, обмірювана між виводами діода при заданих напрузі й частоті.
Час встановлення прямої напруги ![]() інтервал
часу з моменту подачі імпульсу прямого струму на діод (при нульовій напрузі
зсуву) до досягнення заданої прямої напруги на діоді.
інтервал
часу з моменту подачі імпульсу прямого струму на діод (при нульовій напрузі
зсуву) до досягнення заданої прямої напруги на діоді.
Час відновлення зворотного опору
![]() інтервал
часу з моменту проходження струму через нуль після перемикання діода зі стану
заданого струму в стан заданої напруги до моменту досягнення заданого
зворотного струму.
інтервал
часу з моменту проходження струму через нуль після перемикання діода зі стану
заданого струму в стан заданої напруги до моменту досягнення заданого
зворотного струму.
Заряд перемикання ![]() частина накопиченого заряду, що переходить до зовнішнього ланцюга при
зміні напрямку струму із прямого на зворотне.
частина накопиченого заряду, що переходить до зовнішнього ланцюга при
зміні напрямку струму із прямого на зворотне.
Стабілітрон — напівпровідниковий діод, на виводах якого напруга залишається майже постійною, при зміні в деяких межах величини електричного струму, що протікає в ньому.
Для стабілітронів характерними є такі параметри:
Напруга стабілізації ![]() напруга
на стабілітроні при заданому струмі стабілізації.
напруга
на стабілітроні при заданому струмі стабілізації.
Допустиме відхилення напруги
стабілізації від номінального ![]() максимально
допустиме відхилення напруги стабілізації від номінального для стабілітронів
даного типу.
максимально
допустиме відхилення напруги стабілізації від номінального для стабілітронів
даного типу.
Диференціальний опір
стабілітрона ![]() відношення збільшення напруги стабілізації до збільшення струму, що його
викликало.
відношення збільшення напруги стабілізації до збільшення струму, що його
викликало.
Температурний коефіцієнт
напруги стабілізації ![]() відношення відносної зміни напруги стабілізації до абсолютної зміни
температури навколишнього середовища при постійному струмі стабілізації.
відношення відносної зміни напруги стабілізації до абсолютної зміни
температури навколишнього середовища при постійному струмі стабілізації.
Повна ємність стабілітрона ![]() ємність
між виводами стабілітрона при заданій напрузі.
ємність
між виводами стабілітрона при заданій напрузі.
Варикап — напівпровідниковий діод, робота якого базується на залежності бар’єрної ємності переходу від зворотної напруги. Варикапи використовуються в якості елементів з електрично керованою ємністю в схемах перестройки частоти коливального контуру.
Для варикапів характерними є такі параметри:
Ємність варикапа ![]() ємність,
що виміряється між виводами при заданій зворотній напрузі.
ємність,
що виміряється між виводами при заданій зворотній напрузі.
Коефіцієнт перекриття по ємності ![]() відношення
ємностей варикапа при двох заданих зворотних напругах.
відношення
ємностей варикапа при двох заданих зворотних напругах.
Добротність варикапа ![]() відношення
реактивного опору на даній частоті змінного сигналу до опору втрат при заданій
ємності або зворотній напрузі.
відношення
реактивного опору на даній частоті змінного сигналу до опору втрат при заданій
ємності або зворотній напрузі.
Постійний зворотний струм варикапа
![]() постійний
струм, що протікає через діод у зворотному напрямку при заданій зворотній
напрузі.
постійний
струм, що протікає через діод у зворотному напрямку при заданій зворотній
напрузі.
Застосовуються для перетворення змінного струму в пульсуючий і є основним компонентом блоків живлення. Конструкція силового діода зображена на рис.1.4.

Рис. 1.4 Напівпровідниковий силовий діод
а) позначення; б) структура
Фізично силовий діод являє собою p-n перехід, побудований на базі кремнієвої структури з різними типами провідності. Для забезпечення протікання значних струмів площа p-n переходу має бути значно більшою ніж у інших типів діодів.
Для забезпечення високих значень пробивної
напруги ![]() конструкція силових
діодів має певні особливості. Поміж високолегованими областями p та n
знаходиться
конструкція силових
діодів має певні особливості. Поміж високолегованими областями p та n
знаходиться ![]() слаболегована область. При
зворотній напрузі в зоні
слаболегована область. При
зворотній напрузі в зоні ![]() виникає широка область збіднена
носіями заряду, за рахунок цього зменшується напруженість в області p-n
переходу.
виникає широка область збіднена
носіями заряду, за рахунок цього зменшується напруженість в області p-n
переходу.
При прямій напрузі за рахунок
інжекції область ![]() заповнюється рухомими носіями
заряду, тому на опір діода в прямому включенні вона практично не впливає.
заповнюється рухомими носіями
заряду, тому на опір діода в прямому включенні вона практично не впливає.
Як приклад у табл.1.1, 1.2 наведено характеристики діода КД134 та діодної зборки КД135
Таблиця 1.1
|
Параметри |
Познач |
Min |
Max |
Од. вимір. |
|
Пряма напруга |
|
|
|
В |
|
Зворотній струм ( |
|
|
1 |
мкА |
|
Ємність ( |
С |
|
|
пФ |
Електричні параметри діода КД134 та діодної зборки КД135
Таблиця 1.2
Температурні характеристики
|
Параметри |
Познач |
Значення |
Од. вимір |
|
Тепловий опір перехід - середовище |
ZT(П-С) |
600 |
оC/Вт |
|
Тепловий опір перехід - корпус |
ZT(П-С) |
260 |
оC/Вт |
Для побудови високочастотних діодів використовуються p-i-n структури. Завдяки своїй відносній простоті ці структури починаючи з 50-х років знайшли застосування в конструкціях багатьох різновидів напівпровідникових діодів, починаючи від високовольтних випрямних до фотодіодів і гетеролазеров.
Найбільше застосування p-i-n діоди знайшли у приладах ВЧ- і СВЧ-діапазонів для керування рівнем і (або) фазою СВЧ-сигналів, комутації ВЧ- і СВЧ-потужності в лініях передач, для захисту радіотехнічної апаратури від випадкових СВЧ-імпульсів, для стабілізації СВЧ-потужності, а також в атенюаторах ВЧ-діапазона.
У вітчизняній практиці p-i-n-діоди СВЧ-діапазону одержали назву перемикальних і обмежувальних (залежно від роду використання), у ВЧ-діапазоні їх називають комутаційними й регульованими резистивними (для атенюаторів). У закордонній літературі в їхній назві збережений конструктивно-технологічний маркер «PIN-Diodes».
Останнім часом через різке розширення виробництва засобів зв'язку, і переговорних пристроїв, зокрема спеціального призначення, спостерігається постійне збільшення попиту на p-i-n-діоди, що заходять все більше застосування як в апаратурі спеціального призначення, так і у комерційній електроніці.
Структура типового p-i-n-діода зображена на рис.1.5.

Рис. 1.5 Структура p-i-n-діода
Така структура характеризується
тим, що між двома сильно легованими областями дуже низького опору ![]() і
і ![]() перебуває
активна базова i-область із високим питомим опором (типово
перебуває
активна базова i-область із високим питомим опором (типово ![]()
![]() ,
іноді до
,
іноді до ![]()
![]() ) і відносно великим часом
життя електронів і дірок (
) і відносно великим часом
життя електронів і дірок (![]() ~0,1-1,0 мкс). Товщина бази лежить
у межах 3-30 мкм.
~0,1-1,0 мкс). Товщина бази лежить
у межах 3-30 мкм.
Таким чином, при роботі у СВЧ і частково ВЧ
діапазонах p-i-n-діод (без урахування паразитних параметрів ![]() і
і ![]() )
являє собою лінійний резистор, опір якого при прямому зсуві
)
являє собою лінійний резистор, опір якого при прямому зсуві ![]() значно менше,
ніж при зворотному
значно менше,
ніж при зворотному ![]() , при цьому
, при цьому ![]() залежить від
прямого струму.
залежить від
прямого струму.
Як приклад наведемо характеристики діода 2(К)507А
Корпус Б КД105
Пробивна напруга ![]() ,
В 500 - 300
,
В 500 - 300
Розсіювана потужність Р, Вт 5
Загальна ємність ![]() , пф 0,8 - 1,2
, пф 0,8 - 1,2
Накопичений заряд ![]() /
/![]() ,
Нк/мА 200/100
,
Нк/мА 200/100
Прямий опір ![]() /
/![]() Ом/мА 1,5/100
Ом/мА 1,5/100
Названий на честь німецького фізика Baльтера Шотке — напівпровідниковий діод з малим падінням напруги при прямому включенні. Діоди Шотки використають перехід метал-напівпровідник як бар’єр Шотки (замість p-n переходу, як у звичайних діодів). Допустима зворотна напруга діодів Шотки, що випускають промислово обмежена 250 В. На практиці більшість діодів Шотки застосовується в низьковольтних ланцюгах при зворотній напрузі порядку одиниць і декількох десятків вольт.
1. Мале пряме падіння напруги близько 0,2-0,4 В. Настільки мала пряма напруга властива тільки діодам Шотки з максимальною зворотною напругою порядку десятків вольт.
2. Бар'єр Шотки також має меншу електричну ємність переходу, що дозволяє помітно підвищити робочу частоту. Ця властивість використається в інтегральних мікросхемах, де діодами Шотки шунтуються переходи транзисторів логічних елементів. У силовій електроніці мала ємність переходу (тобто короткий час відновлення) дозволяє будувати випрямлячі на частоти в сотні кГц і вище. Наприклад, діод MBR4015 (15 В, 40 А), оптимізованими під високочастотне випрямлення, нормований для роботи при d/dt до 1000 В/мс.
3. Завдяки кращим динамічним характеристикам і малим ємностям переходу випрямлячі на діодах Шотки відрізняються від традиційних діодних випрямлячів зниженим рівнем перешкод.
1. При короткочасному перевищенні максимальної зворотної напруги діод Шотки виходить із ладу, на відміну від кремнієвих діодів, які переходять у режим зворотного пробою, і за умови не перевищення максимальної потужності, що розсіюється на діоді, після падіння напруги кремнієвий діод повністю відновлює свої властивості.
2. Діоди Шотки характеризуються підвищеними (щодо звичайних кремнієвих діодів) зворотними струмами, що зростають із ростом температури кристала
Як приклад, наведено значення параметрів діоду Шотки типу 1N5819PBF
|
Матеріал |
кремній |
|
Максимальна постійна зворотна напруга, В |
40 |
|
Максимальна імпульсна зворотна напруга, В |
40 |
|
Максимальний прямій (випрямлений за півперіод) струм, А |
1 |
|
Максимально припустимий прямий імпульсний струм, А |
25 |
|
Максимальний
зворотний струм, мкА при 25 |
1 |
|
Максимальна пряма
напруга, В при 25 |
0.60 |
|
Робоча температура, |
65...…125 |
|
Спосіб монтажу |
в отвір. |
|
Корпус |
DO-41 |
Диністор – напівпровідниковий прилад, що має три p-n переходи, зовнішні виводи виконані лише від крайніх областей (p та n). На рис.1.6 зображено диністор, його структуру та вольт-амперну характеристику.
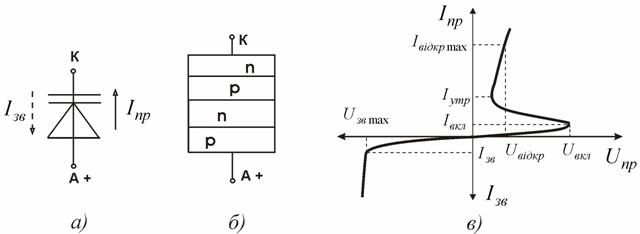
Рис. 1.6 Диністор: а) позначення диністора; б) структура диністора; в) ВАХ диністора
Якщо плавно збільшувати напругу, струм через
диністор буде спочатку незначно зростати (рис.1.6, в). При цьому
диністор практично закритий. Такий стан буде поки напруга на диністорі не стане
дорівнювати напрузі включення ![]() . В цей момент в чотирьох шаровій
структурі настає лавиноподібний процес зростання струму і диністор переходить у
відкритий стан. Падіння напруги на ньому різко зменшиться (це видно на рис.1.6,
в), а струм через диністор тепер буде визначатися опором навантаження,
але він не повинен перевищувати максимально допустимого значення
. В цей момент в чотирьох шаровій
структурі настає лавиноподібний процес зростання струму і диністор переходить у
відкритий стан. Падіння напруги на ньому різко зменшиться (це видно на рис.1.6,
в), а струм через диністор тепер буде визначатися опором навантаження,
але він не повинен перевищувати максимально допустимого значення ![]() .
.
Напруга, при якій диністор відкривається,
називають напругою включення ![]() , а відповідний цьому значенню
струм - струмом включення
, а відповідний цьому значенню
струм - струмом включення ![]() .
.
У відкритому стані диністор може знаходитися
до тих пір, поки прямий струм через нього буде перевищувати мінімально
допустимий струм ![]() , що називається струмом
утримання.
, що називається струмом
утримання.
Зворотна вітка характеристики диністора схожа
на характеристику діода. Подача на диністор зворотної напруги вище допустимого ![]() може
вивести диністор з ладу.
може
вивести диністор з ладу.
1.1.2. Тиристори
Тиристор - це перемикаючий напівпровідниковий прилад, що пропускає струм в одному напрямку. Його називають напівпровідниковим керованим вентилем (Silicon Controlled Rectifier, SCR).
Тиристор має три виводи, один із яких - керуючий електрод - використовується для управління станом тиристора. При подачі імпульсів управління на відкривання тиристора він різко переходить у включений стан.
Основні властивості тиристора:
1. Тиристор, як і діод, проводить в одному напрямку, проявляючи себе як випрямляч;
2. Тиристор переводиться з виключеного стану у включене при подачі сигналу на керуючий електрод і, отже, як вимикач має два стійких стани. Проте для повернення тиристора у виключений (розімкнутий) стан необхідно виконати спеціальні умови;
3. Керуючий струм, необхідний для переведення тиристора із закритого стану у відкрите, значно менше робочого;
4. Середній струм через навантаження, яке включене послідовно з тиристором, можна точно регулювати залежно від тривалості включеного стану тиристора.
Тиристор - керований трьохелектродний напівпровідниковий прилад, що складається із чотирьох кремнієвих шарів р та n типу, що чергуються.
Графічне позначення, структура та статична характеристика тиристора наведені на рис.1.7, а-в.

Рис. 1.7 Тиристор: а) позначення тиристора; б) структура тиристора;
в) статична ВАХ тиристора
Принцип вмикання за допомогою керуючого електрода.
При відсутності струму керуючого електроду
його переключення відбувається при напрузі ![]() . При наявності струму
керування напруга переключення буде тим меншою, чим більший струм керування.
При певній величині струму керування
. При наявності струму
керування напруга переключення буде тим меншою, чим більший струм керування.
При певній величині струму керування ![]() , яку називають струмом
спрямлення, тиристор включиться при будь якій прямій напрузі більше нуля
(рис.1.7, в). Процес переключення тиристора протікає лавиноподібно з
часом включення
, яку називають струмом
спрямлення, тиристор включиться при будь якій прямій напрузі більше нуля
(рис.1.7, в). Процес переключення тиристора протікає лавиноподібно з
часом включення ![]() мкс.
мкс.
Після того як тиристор ввімкнено імпульс управління на керуючому електроді уже не потрібен і його можна зняти, при цьому тиристор залишиться у включеному стані.
Для вимикання тиристора необхідно зменшити
його анодний струм до величини меншої за струм утримання ![]() . При роботі
тиристора в колах змінного струму його виключення відбувається природнім шляхом
кожного разу коли змінюється полярність струму, що проходить через тиристор.
При роботі тиристора в колах постійного струму для його виключення необхідно
використовувати допоміжні пристрої – вузли примусової комутації.
. При роботі
тиристора в колах змінного струму його виключення відбувається природнім шляхом
кожного разу коли змінюється полярність струму, що проходить через тиристор.
При роботі тиристора в колах постійного струму для його виключення необхідно
використовувати допоміжні пристрої – вузли примусової комутації.
До основних параметрів тиристорів відносять:
![]() максимальне
значення амплітуди робочої напруги тиристора в закритому стані;
максимальне
значення амплітуди робочої напруги тиристора в закритому стані;
![]() максимальне
середньоквадратичне значення струму через тиристор ;
максимальне
середньоквадратичне значення струму через тиристор ;
![]() максимальний
ударний неповторюваний струм у відкритому стані;
максимальний
ударний неповторюваний струм у відкритому стані;
![]() захисний
показник. Якщо в пристрої із застосуванням тиристора встановлений захисний
прилад, наприклад, плавкий запобіжник, значення його
захисний
показник. Якщо в пристрої із застосуванням тиристора встановлений захисний
прилад, наприклад, плавкий запобіжник, значення його ![]() повинне
бути менше, ніж у тиристора;
повинне
бути менше, ніж у тиристора;
![]() максимальна
імпульсна потужність, що розсіється у керуючому електроді;
максимальна
імпульсна потужність, що розсіється у керуючому електроді;
![]() максимальний
імпульсний струм керуючого електрода;
максимальний
імпульсний струм керуючого електрода;
![]() максимальна
імпульсна напруга керуючого електрода;
максимальна
імпульсна напруга керуючого електрода;
![]() максимальний
спад напруги на тиристорі при проходженні короткого імпульсу струму;
максимальний
спад напруги на тиристорі при проходженні короткого імпульсу струму;
![]() постійний
струм керуючого електрода, що вмикає;
постійний
струм керуючого електрода, що вмикає;
![]() постійна
напруга керуючого електрода, що вмикає;
постійна
напруга керуючого електрода, що вмикає;
![]() струм
утримання;
струм
утримання;
![]() тепловий опір перехід-навколишнє
середовище.
тепловий опір перехід-навколишнє
середовище.
У табл.1.3 наведено основні параметри деяких тиристорів фірми Motorola
Таблиця 1.3
|
Тиристори |
Umax |
Imax |
Iутр |
I2t |
Py max |
Iy max |
Uy max |
Uoc max |
Iy.вм |
Uy.вм |
Iутр |
RT |
Тип корп. |
|
MCR100-3 |
100 |
0,8 |
10 |
0,415 |
0,1 |
1 |
5 |
1,7 (1 А) |
0,2 |
0,8 |
5 |
200 |
ТО-92 |
|
MCR100-4 |
200 |
||||||||||||
|
MCR100-6 |
400 |
||||||||||||
|
MCR100-8 |
600 |
Повністю керований тиристор (GTO)
Перші подібні тиристори з'явилися в 1960 р. у США. Вони одержали назву Gate Turn Off (GTO). У середині 90-х років були розроблені повністю керовані тиристори з кільцевим виводом керуючого електрода. Вони одержали назву Gate Commutated Thyristor (GCT) і стали в подальшому розвитком GTO-технології.
GTO тиристор - повністю керований напівпровідниковий прилад, в основі якого лежить класична чотирьохшарова структура. Такий тиристор включають і виключають подачею позитивного й негативного імпульсів струму на електрод керування. Подібно звичайному тиристору, він має катод K, анод А, та керуючий електрод (іноді позначається G – gate) (рис.1.8, а.).
На схематичному розрізі тиристорної структури (рис.1.8, б) нижній вивід - анодний. Анод контактує із шаром p. Далі (знизу нагору) розташовані: базовий шар n, базовий шар p (що містить вивід керуючого електрода) і шар n, що безпосередньо контактує з катодним виводом. Чотири шари утворять три p-n-переходи: перший між шарами p і n; другий між шарами n і p; третій між шарами p і n (рис.1.8, б).
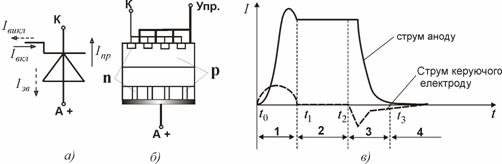
Рис. 1.8 GTO тиристор: а) позначення тиристора; б) структура тиристора;
в) зміна струму анода та керуючого електроду
Розходження в структурах різних тиристорів полягає в іншому розташуванні горизонтальних і вертикальних шарів з n- і р-провідностями. Найбільшої зміни у сучасних тиристорах зазнав катодний шар. Він виготовляється з кількох сотень елементарних осередків, рівномірно розподілених по площі й з'єднаних паралельно. Таке виконання забезпечує рівномірне зниження струму по всій площі напівпровідникової структури при вимиканні приладу. Базовий шар p, незважаючи на те що виконаний як єдине ціле, має велику кількість контактів керуючого електроду (приблизно рівне числу катодних осередків), також рівномірно розподілених по площі й з'єднаних паралельно. Базовий шар n виконаний аналогічно відповідному шару звичайного тиристора. Анодний шар p має шунти (зони n), що з'єднують n-базу з анодним контактом через невеликі розподілені опори. Анодні шунти застосовують у тиристорах, що не мають зворотної здатності. Вони призначені для зменшення часу вимикання приладу за рахунок поліпшення умов виймання зарядів з базової області n.
Основне виконання тиристорів GTO - таблеткове з чотирьохшаровою кремнієвою пластиною, затиснутою через термокомпенсуючі молібденові диски між двома мідними основами, що мають підвищену тепло- і електропровідність. Із кремнієвою пластиною контактує керуючий електрод, що має вивід у керамічному корпусі. Прилад затискається контактними поверхнями між двома половинами охолоджувачів, ізольованих одна від одної й має конструктивне використання, обумовлене типом системи охолодження (рис.1.8, б).
У циклі роботи тиристора GTO розрізняють чотири інтервали:
1) включення, 2) провідний стан, 3) вимикання, 4) вимкнений стан.
На рис.1.8, в першому інтервалу – включення відповідає інтервал часу ![]() .
Перехід тиристорної структури з виключеного стану у відкритий можливий тільки
при позитивній прямій напрузі між анодом і катодом. Чотири шари утворюють три p-n-переходи:
1 - між шарами p і n; 2 - між шарами n і p; 3 - між
шарами p і n (рис.1.8, б). Переходи 1 і 3 зміщаються в
прямому напрямку й не перешкоджають проходженню носіїв зарядів. Вся напруга
прикладається до середнього переходу 2, що зміщається у зворотному напрямку.
Біля переходу 2 утвориться зона, збіднена носіями зарядів, що одержала назву області об'ємного заряду. Щоб включити тиристор
GTO, до керуючого електрода й катода по колу керування прикладається напруга
позитивної полярності (вивід «+» до шару p). У результаті у колі
протікає струм включення
.
Перехід тиристорної структури з виключеного стану у відкритий можливий тільки
при позитивній прямій напрузі між анодом і катодом. Чотири шари утворюють три p-n-переходи:
1 - між шарами p і n; 2 - між шарами n і p; 3 - між
шарами p і n (рис.1.8, б). Переходи 1 і 3 зміщаються в
прямому напрямку й не перешкоджають проходженню носіїв зарядів. Вся напруга
прикладається до середнього переходу 2, що зміщається у зворотному напрямку.
Біля переходу 2 утвориться зона, збіднена носіями зарядів, що одержала назву області об'ємного заряду. Щоб включити тиристор
GTO, до керуючого електрода й катода по колу керування прикладається напруга
позитивної полярності (вивід «+» до шару p). У результаті у колі
протікає струм включення ![]() .
.
GTO тиристори мають жорсткі
вимоги до крутості фронту ![]() і амплітуди
і амплітуди ![]() струму
керування. Через перехід 3, крім струму витоку, починає протікати струм
включення
струму
керування. Через перехід 3, крім струму витоку, починає протікати струм
включення ![]() . Електрони, що створюють цей
струм, будуть інжектуватися з шару n у шар p. Далі частина з них
буде переноситися електричним полем базового переходу 2 у шар n.
Одночасно збільшиться зустрічна інжекція дірок із шару p у шар n
і далі в шар p, тобто відбудеться збільшення струму, створеного
неосновними носіями зарядів. Сумарний струм, що проходить через базовий перехід
. Електрони, що створюють цей
струм, будуть інжектуватися з шару n у шар p. Далі частина з них
буде переноситися електричним полем базового переходу 2 у шар n.
Одночасно збільшиться зустрічна інжекція дірок із шару p у шар n
і далі в шар p, тобто відбудеться збільшення струму, створеного
неосновними носіями зарядів. Сумарний струм, що проходить через базовий перехід
![]() ,
перевищує струм включення, відбувається відкриття тиристора, після чого носії
зарядів будуть вільно переходити через всі його чотири області.
,
перевищує струм включення, відбувається відкриття тиристора, після чого носії
зарядів будуть вільно переходити через всі його чотири області.
Інтервал 2 - провідний стан (інтервал часу ![]() на
рис.1.8, в).
на
рис.1.8, в).
У режимі протікання прямого струму немає
необхідності в струмі ![]() , якщо анодний струм перевищує
величину струму утримання
, якщо анодний струм перевищує
величину струму утримання ![]() . Однак на практиці, для того щоби
всі структури GTO тиристора постійно перебували в провідному стані, необхідна
підтримка струму, передбаченого для даного температурного режиму. Таким чином,
протягом часу включення й знаходження в провідному стані система керування
формує струм позитивної полярності. У провідному стані всі області
напівпровідникової структури забезпечують рівномірний рух носіїв зарядів
(електронів від катода до анода, дірок — у зворотному напрямку). Через переходи
1, 2 протікає анодний струм, через перехід 3 — сумарний струм анода й керуючого
електрода.
. Однак на практиці, для того щоби
всі структури GTO тиристора постійно перебували в провідному стані, необхідна
підтримка струму, передбаченого для даного температурного режиму. Таким чином,
протягом часу включення й знаходження в провідному стані система керування
формує струм позитивної полярності. У провідному стані всі області
напівпровідникової структури забезпечують рівномірний рух носіїв зарядів
(електронів від катода до анода, дірок — у зворотному напрямку). Через переходи
1, 2 протікає анодний струм, через перехід 3 — сумарний струм анода й керуючого
електрода.
Інтервал 3 – вимикання (інтервал часу ![]() на рис.1.8, в).
на рис.1.8, в).
Для вимикання тиристора GTO при незмінній
полярності напруги, до керуючого електрода й катода по колу керування
прикладається напруга негативної полярності. Вона викликає струм вимикання ![]() ,
протікання якого веде до розсмоктування основних носіїв заряду (дірок) у
базовому шарі p. Інакше кажучи, відбувається рекомбінація дірок, що
надійшли в шар p з базового шару n, і електронів, що надійшли в
цей же шар по керуючому електроду.
,
протікання якого веде до розсмоктування основних носіїв заряду (дірок) у
базовому шарі p. Інакше кажучи, відбувається рекомбінація дірок, що
надійшли в шар p з базового шару n, і електронів, що надійшли в
цей же шар по керуючому електроду.
З часом звільнення від них базового переходу 2 тиристор починає закриватися. Цей процес характеризується різким зменшенням прямого струму тиристора за короткий проміжок часу до невеликої величини. Відразу після запирання базового переходу 2 починає закриватися перехід 3, однак за рахунок енергії, запасеної в індуктивності ланцюгів керування, він ще якийсь час перебуває у відкритому стані.
Після того як вся енергія, запасена в індуктивності ланцюга керування, буде витрачена, перехід 3 з боку катода повністю закривається. З цього моменту струм через тиристор дорівнює струму витоку, що протікає від анода до катода через ланцюг керуючого електрода. Процес рекомбінації, вимикання тиристора, багато в чому залежить від крутизни фронту і амплітуди зворотного струму керування. Щоб забезпечити необхідні крутизну фронту і амплітуду цього струму, на керуючий електрод потрібно подати напругу, що не повинна перевищувати величини, припустимої для переходу 3.
Інтервал 4 – вимкнений стан (інтервал часу від
![]() рис.1.8,
в).
рис.1.8,
в).
У цьому режимі до керуючого електрода й катода залишається прикладеною напруга негативної полярності від блоку керування. По ланцюгу керування протікає сумарний струм, що складається зі струму витоку тиристора й зворотного струму керування, що проходить через перехід 3. Останній зміщується у зворотному напрямку. Таким чином, у тиристорі GTO, що перебуває в прямому стані, що блокує, два переходи (2 і 3) зміщені у зворотному напрямку, і утворені дві області просторового заряду. Протягом усього часу вимикання й стану, що блокує, система керування формує напругу негативної полярності.
Захисні ланцюги. Використання тиристорів GTO вимагає застосування спеціальних захисних ланцюгів. Вони збільшують масогабаритні показники, вартість перетворювача, іноді вимагають додаткових охолоджувальних пристроїв, однак є необхідними для нормального функціонування приладів.
1. Наведіть ВАХ напівпровідникового діода.
2. Привести динамічну характеристику діода.
3. Що таке максимально допустимі параметри діода? Навести приклади.
4. Привести структуру силового діода.
5. Навести структуру ВЧ діода, пояснити основні відмінності.
6. Які основні переваги діодів Шотки?
7. Які недоліки діодів Шотки, якщо вони існують?
8. Що таке диністор? Приведіть його ВАХ.
9. Назвіть основні властивості тиристора.
10. Яку структуру має тиристор?
11. Наведіть умовне графічне позначення тиристора.
13. Які особливі моменти можна відзначити в керуванні тиристором?
14. Що таке GTO тиристор? Його основні відмінності від напівкерованого тиристора.
15. Наведіть динамічну характеристика GTO тиристора, назвіть її основні робочі інтервали.
1.1.3. Транзистори
Біполярний транзистор (БТ) – напівпровідниковий прилад, що складається із двох послідовних p-n-переходів, робота якого заснована на використанні двох типів носіїв заряду (електронів та дірок). В залежності від порядку чергування напівпровідникових шарів із різним типом провідності (р- та n - типу) біполярні транзистори поділяють на дві основні групи: 1) p-n-p - типу; 2) n-p-n - типу.
На рис. 1.9, а-б зображено найпростішу структуру транзисторів відповідно як p-n-p-типу, так і n-p-n-типу. Основний принцип роботи від типу біполярного транзистора не залежить, але тип транзистора визначає тип основних носіїв, що забезпечують протікання струму, і полярність напруг, що підключаються.
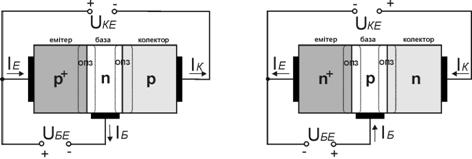
Рис. 1.9 Структура біполярного транзистора:
а) – p-n-p-типу; б) – n-p-n-типу;
Середня напівпровідникова область в структурі наведеній на рис. 1.9, а-б, що має відмінний від двох інших областей тип провідності, називається базовою областю, а електрод, що приєднується до неї та виконує роль керуючого електрода – базою транзистора. Дві інші напівпровідникові області, що мають протилежний до бази тип провідності та утворюють разом із базою два p-n- переходи із областю просторового заряду (ОПЗ), називаються емітерною та колекторною областю. Відповідно електроди приєднані до кожної із цих областей називаються емітером та колектором. Головною відмінністю між ними є те, що емітер є більш легованим напівпровідником, колектор має більший за площею p-n-перехід, а ширина бази є значно меншою поперечних розмірів p-n-переходів.
На рис. 1.10, а-б наведено умовні графічні позначення біполярних транзисторів.
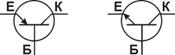
Рис. 1.10 Умовні графічні позначення біполярних транзисторів:
а) – p-n-p - типу; б) – n-p-n - типу;
Кожен із двох p-n-переходів в біполярному транзисторі можна за допомогою зовнішньої напруги зміщувати як у прямому, так і у зворотному напрямі, в залежності від чого розрізняють такі режими роботи біполярного транзистора:
1. Режим відсічки – обидва p-n-переходи зворотно зміщенні, тобто закриті;
2. Активний режим – емітерний p-n-перехід зміщений у прямому напрямі, а колекторний p-n-перехід зворотно зміщений;
3. Інверсний режим – подібний до активного режиму (колекторний p-n-перехід зміщений у прямому напрямі, а емітерний - зворотно зміщений);
4. Режим насичення – обидва p-n-переходи зміщенні у прямому напрямі.
В режимі 1 роботи біполярного транзистора база
та обидва переходи збіднені на основні рухливі носії заряду (напруги ![]() ,
, ![]() мають
протилежну полярність ніж на рис. 1.9), внаслідок чого струм через обидва p-n-переходи
майже відсутній, а сам транзистор має дуже високий опір, що може вважатися як
розрив в ланцюгу.
мають
протилежну полярність ніж на рис. 1.9), внаслідок чого струм через обидва p-n-переходи
майже відсутній, а сам транзистор має дуже високий опір, що може вважатися як
розрив в ланцюгу.
В режимі 2 роботи біполярного транзистора
емітерний p-n-перехід зміщений у прямому напрямі, а колекторний – у
зворотному. Прикладена до емітерного переходу напруга (полярності ![]() ,
, ![]() співпадають
із зображеними на рис. 1.9) зменшує його потенціал, і тоді із емітера в базу
інжектуються електрони (основні носії заряду в даному транзисторі), невелика
частина з яких або дифундує назад до емітерної області, або рекомбінує із
дирками (основними носіями в базі). Більша ж частина електронів минає невелику
область бази і надходить до зворотно зміщеного колекторного переходу, що
екстрагує дані носії в колекторну область. Таким чином створюється колекторний
струм
співпадають
із зображеними на рис. 1.9) зменшує його потенціал, і тоді із емітера в базу
інжектуються електрони (основні носії заряду в даному транзисторі), невелика
частина з яких або дифундує назад до емітерної області, або рекомбінує із
дирками (основними носіями в базі). Більша ж частина електронів минає невелику
область бази і надходить до зворотно зміщеного колекторного переходу, що
екстрагує дані носії в колекторну область. Таким чином створюється колекторний
струм ![]() , який практично рівний емітерному
струму
, який практично рівний емітерному
струму ![]() , за умовою невеликих втрат на
рекомбінацію в базі транзистора (
, за умовою невеликих втрат на
рекомбінацію в базі транзистора (![]() ,
, ![]() ). Тобто біполярний
транзистор є струмовим приладом, так як змінюючи невеликий струм бази
). Тобто біполярний
транзистор є струмовим приладом, так як змінюючи невеликий струм бази ![]() можна
змінювати значний струм колектора
можна
змінювати значний струм колектора ![]() . Коефіцієнт передачі по струму
α пов’язує колекторний та емітерний струми і дорівнює
. Коефіцієнт передачі по струму
α пов’язує колекторний та емітерний струми і дорівнює ![]() .
.
Режим 3 роботи біполярного транзистора подібний за механізмом до режиму 2, з умовою переміни функцій емітерного та колекторного p-n-переходів. Проте внаслідок гіршого підсилення, ніж в режимі 2, даний режим роботи біполярного транзистора майже не використовується.
В режимі 4 роботи біполярного транзистора обидва p-n-переходи знаходяться у відкритому стані, внаслідок чого електрони в базу, окрім емітерної області, також інжектує колекторна область. Через це база та обидва p-n-переходи перенасичуються основними носіями (електронами) і опір всієї структури стає мінімальним. Тому коло, що містить біполярний транзистор в даному режимі, можна вважати короткозамкненим.
За типами включення біполярного транзистора в схему розрізняють:
1. Схему із спільною базою;
2. Схему із спільним емітером;
3. Схему із спільним колектором („емітерний повторювач”);
На рис. 1.11, а-в зображено основні схеми включення біполярного транзистора в схему.

Рис. 1.11 Основні схеми включення біполярного транзистора в схему:
а) із спільною базою; б) із спільним емітером; в) із спільним колектором.
Схема із спільною
базою (рис.1.11, а) має невеликий вхідний опір (десятки Ом), так як в
цьому випадку вхідний ланцюг представляє собою відкритий емітерний p-n-перехід,
та не підсилює струм, тому коефіцієнт підсилення по струму рівний ![]() .
Дана схема має найкращі температурні та частотні властивості серед усіх схем
включення БТ. Вхідна і вихідна характеристики для даної схеми включення
біполярного транзистора наведені відповідно на рис. 1.12, б та
рис.1.12, а.
.
Дана схема має найкращі температурні та частотні властивості серед усіх схем
включення БТ. Вхідна і вихідна характеристики для даної схеми включення
біполярного транзистора наведені відповідно на рис. 1.12, б та
рис.1.12, а.

Рис. 1.12 Характеристики біполярного транзистора
p-n-p-типу в схемі із спільною базою:
а) вихідна характеристика; б) вхідна характеристика.
На рис.1.12, б зображено залежність
вхідної характеристики від температури (штрих-пунктирні лінії), при її
збільшенні ![]() або зменшенні
або зменшенні ![]() .
.
На вихідній характеристиці біполярного транзистора (рис.1.12, а) в схемі із спільною базою (рис.1.11, а) розрізняють три робочі зони:
I. Область насичення (точки С та В на рис.1.12, а та рис.1.12, б);
II.
Область підсилення або активна зона (точка А на рис.1.12, а
та рис.1.12, б), що також містить зону відсічки (точка D на рис.1.12, а
та рис.1.12, б), за умови відсутності емітерного струму ![]() ;
;
III. Область пробою.
Схема із спільним
емітером (рис. 1.11, б) має найбільший серед усіх схем коефіцієнт
підсилення по струму ![]() , а також великий вхідний опір.
Саме тому дана схема ввімкнення біполярного транзистора є найбільш
використовуваною. Проте ця схема поступається в якості частотних та
температурних властивостей схемі із спільною базою.
, а також великий вхідний опір.
Саме тому дана схема ввімкнення біполярного транзистора є найбільш
використовуваною. Проте ця схема поступається в якості частотних та
температурних властивостей схемі із спільною базою.

Рис. 1.13 Основні характеристики БТ p-n-p-типу в схемі із спільним емітером:
а) вихідна характеристика; б) вхідна характеристика.
Як і у випадку схеми із спільною базою, на вихідній характеристиці БТ (рис.1.13, а) в схемі із спільним емітером (рис.1.11, а) розрізняють три робочі зони:
I. Область насичення (точки С та В на рис.1.13, а та рис.1.13, б);
II.
Область підсилення або активна зона (точка А на рис.1.13, а
та рис.1.13, б), із зоною відсічки (точка D на рис.1.13, а та
рис.1.13, б) за умови ![]() ;
;
III. Область пробою.
Схема із спільним колектором (рис.1.11, в)
має великий вхідний опір, проте дана схема не підсилює напругу. В даному режимі
роботи транзистора коефіцієнт передачі по струму рівний ![]() .
.
На сьогоднішній день існує дуже широка класифікація біполярних транзисторів, переважна більшість з яких створюються на основі кремнію. Біполярні транзистори класифікують як за потужністю (для малих, середніх, великих потужностей), так і за максимальною частотою роботи (низькочастотні і середньочастотні, високочастотні і надвисокочастотні).
Основним недоліком біполярних транзисторів є наявність явища вторинного пробою, що відсутній у польових транзисторів. Вторинний пробій лавиноподібно розвивається після первинного та характеризується швидким наростанням струму колектора і повною некерованістю, на відміну від польових транзисторів, що зберігають керуючі властивості аж до моменту пробою.
До основних параметрів біполярного транзистора відносяться:
![]() (
(![]() ) – максимальна
(максимальна імпульсна) розсіювана потужність;
) – максимальна
(максимальна імпульсна) розсіювана потужність;
![]() – максимальний струм колектора;
– максимальний струм колектора;
![]() – максимальний імпульсний струм
колектора;
– максимальний імпульсний струм
колектора;
![]() – максимальна напруга
колектор-емітер;
– максимальна напруга
колектор-емітер;
![]() – максимальна напруга
колектор-база;
– максимальна напруга
колектор-база;
![]() – максимальна напруга
емітер-база;
– максимальна напруга
емітер-база;
![]() – зворотній струм колектора;
– зворотній струм колектора;
![]() – зворотній струм емітера;
– зворотній струм емітера;
![]() – вхідний опір транзистора (при
– вхідний опір транзистора (при ![]() по
змінному струму);
по
змінному струму);
![]() – вихідна провідність транзистора
(при
– вихідна провідність транзистора
(при ![]() по змінному струму);
по змінному струму);
![]() – коефіцієнт передачі по струму
(при
– коефіцієнт передачі по струму
(при ![]() по змінному струму);
по змінному струму);
![]() – максимальна частота коефіцієнта
передачі по струму, при якій
– максимальна частота коефіцієнта
передачі по струму, при якій ![]() ;
;
![]() – ємність колекторного переходу;
– ємність колекторного переходу;
![]() – ємність емітерного переходу;
– ємність емітерного переходу;
Так як ![]() параметри
параметри ![]() є
загальновживаними в довідковій літературі, а також те, що даний параметр
найчастіше приводиться для схеми із спільним емітером (
є
загальновживаними в довідковій літературі, а також те, що даний параметр
найчастіше приводиться для схеми із спільним емітером (![]() ), то зв’язок
), то зв’язок ![]() із
параметрами для схем із спільною базою (
із
параметрами для схем із спільною базою (![]() ) і спільним колектором (
) і спільним колектором (![]() )
виражається наступними формулами:
)
виражається наступними формулами:
![]()
![]()
Зв’язок ![]() параметрів із напругами і струмами
в певній схемі з’єднання має вигляд:
параметрів із напругами і струмами
в певній схемі з’єднання має вигляд:
 (1.1)
(1.1)
Як приклад, в табл. 1.4 наведено параметри двох біполярних транзисторів n-p-n-типу.
Таблиця 1.4
|
|
КТ603В |
2N5831 |
|
|
500 |
630 |
|
|
300 |
300 |
|
|
600 |
– |
|
|
15 |
140 |
|
|
15 |
160 |
|
|
3 |
– |
|
|
5 |
0,05 мкА |
|
|
3 |
– |
|
|
– |
– |
|
|
– |
– |
|
|
10...80 (2 В, 150 мА) |
80(5 B, 10мА) |
|
|
200 |
100 |
|
|
15 |
4 |
|
|
40 |
– |
Польовий транзистор (ПТ) – напівпровідниковий прилад робота якого заснована на модуляції опору напівпровідникового матеріалу поперечним електричним полем. В них використовується ефект зміни величини області просторового заряду (ОПЗ).
Польові транзистори діляться на два основні класи:
1. З керуючим p-n-переходом (ПТКП, англ. JFET);
2. Із структурою метал-діелектрик-напівпровдник (МДН, англ. MOSFET), у якій затвор ізольований від робочого напівпровідника діелектриком.
Так як в якості діелектрика найчастіше використовують оксид кремнію, то МДН-транзистори також ще називають МОН-транзисторами.
На рис.1.14 зображено структуру транзисторів з керуючим p-n-переходом. Характерною особливістю таких польових транзисторів є те, що їх затвор ізольований від каналу, що проводить струм, зворотнозміщеним p-n-переходом.

Рис. 1.14 Структура n-канального польового транзистора з керуючим p-n-переходом:
а) з одним керуючим електродом; б) з двома керуючими електродами.
Даний транзистор має один (рис. 1.14, а) або два (рис. 1.14, б) електроно-дірочних переходи, що зміщенні у зворотному напрямі. При зміні зворотної напруги на p-n-переході варіюється величина ОПЗ на межі p- та n-областей, а отже змінюється і опір каналу, по якому проходить керований потік основних зарядів. Електрод, з якого в канал надходять основні носії заряду, називається витоком, а електрод в який із каналу витікають основні носії – стоком. Електрод, що слугує для керування величиною каналу, називається затвором.
Польові транзистори, на відміну від біполярних, є уніполярними приладами. Канал провідності в польових транзисторах може бути як n-, так і p-типу, що визначається типом основних носіїв заряду. Тому в залежності від типу каналу польові транзистори поділяють на транзистори з n- (рис.1.15, а) та p-провідністю (рис.1.15, б). Відповідно до типу провідності польового транзистора полярності напруги на затворі, стоку та витоку і напрямки струмів будуть протилежними.

Рис. 1.15 Умовне позначення польового транзистора з керуючим p-n-переходом:
а) n-типу; б) p-типу.
На рис.1.16, а-б приведено основні характеристики польового транзистора n-типу з керуючим p-n-переходом. Для транзистора р-типу основні характеристики будуть симетричними до зображених на рис.1.16 відносно початку координат.

Рис. 1.16 Основні характеристики польового транзистора з керуючим p-n-переходом:
а) вихідна (стокова) характеристика; б) стоково-затворна характеристика.
Характерними особливостями польових
транзисторів із керуючим p-n-переходом є наявність струму насичення або
початкового струму стоку ![]() (рис.1.16, б), за
відсутності напруги
(рис.1.16, б), за
відсутності напруги ![]() та при умові
та при умові ![]() , а також
наявність напруги відсічки
, а також
наявність напруги відсічки ![]() , за якої канал провідності майже
повністю перекривається і
, за якої канал провідності майже
повністю перекривається і ![]() . Це пояснюється тим, що величина
провідності каналу в польовому транзисторі з керуючим p-n-переходом
окрім напруги
. Це пояснюється тим, що величина
провідності каналу в польовому транзисторі з керуючим p-n-переходом
окрім напруги ![]() також залежить від величини
струму стоку
також залежить від величини
струму стоку ![]() . Із зростанням
. Із зростанням ![]() при
при ![]() ширина ОПЗ по всій
площині напівпровідника збільшується нерівномірно, тобто при деякому значенні
ширина ОПЗ по всій
площині напівпровідника збільшується нерівномірно, тобто при деякому значенні ![]() буде
більшою біля стоку аніж біля витоку (рис.1.14, б). І зрештою, за деякого
значення
буде
більшою біля стоку аніж біля витоку (рис.1.14, б). І зрештою, за деякого
значення ![]() перетин каналу провідності біля
стоку майже повністю замкнеться, тобто матиме найбільший опір. Таким чином
найбільший струм
перетин каналу провідності біля
стоку майже повністю замкнеться, тобто матиме найбільший опір. Таким чином
найбільший струм ![]() буде за найменшого опору
буде за найменшого опору ![]() каналу
провідності та відсутності керуючої напруги
каналу
провідності та відсутності керуючої напруги ![]() , а сам транзистор даного
типу працює в режимі збіднення. Керуюча напруга
, а сам транзистор даного
типу працює в режимі збіднення. Керуюча напруга ![]() (рис.1.16, б)
для польового транзистора n-типу не може мати великих позитивних
значень внаслідок загрози пробою.
(рис.1.16, б)
для польового транзистора n-типу не може мати великих позитивних
значень внаслідок загрози пробою.
Вихідна характеристика польового транзистора з керуючим p-n-переходом (рис.1.16, а) характеризується наявністю трьох робочих областей:
I. Лінійна (або омічна) область;
II. Область насичення (або область підсилення);
III. Область лавинного пробою.
В області I (рис.1.16, а), що
починається від початку координат до точок ![]() , польовий транзистор
представляє собою майже лінійно залежний від напруги
, польовий транзистор
представляє собою майже лінійно залежний від напруги ![]() опір
опір ![]() , що
також регулюється напругою
, що
також регулюється напругою ![]() , та може використовуватись в
ключовому режимі роботи.
, та може використовуватись в
ключовому режимі роботи.
В області II (рис.1.16, а), що
починається від точок ![]() до точок
до точок ![]() , опір
, опір ![]() польового
транзистора майже не залежить від значення напруги
польового
транзистора майже не залежить від значення напруги ![]() , так як відповідає
випадку максимального звуження перетину каналу провідності біля стоку. В даному
режимі польовий транзистор може використовуватися як підсилювач сигналів.
, так як відповідає
випадку максимального звуження перетину каналу провідності біля стоку. В даному
режимі польовий транзистор може використовуватися як підсилювач сигналів.
Із подальшим збільшенням напруги ![]() відбувається
збільшення падіння напруги біля горловини каналу провідності на фоні зростання
електричного поля в каналі, що призводить до пробою (область III на рис.1.16, а).
відбувається
збільшення падіння напруги біля горловини каналу провідності на фоні зростання
електричного поля в каналі, що призводить до пробою (область III на рис.1.16, а).
Основні переваги польових транзисторів з керуючим p-n-переходом:
· менший рівень шуму ніж в біполярних транзисторах, особливо в області низьких частот, внаслідок уніполярності приладу, що дозволяє використовувати ПТ на частотах до сотень MГц;
·
незначні зворотні струми через затвор (10
пA÷10 нA), що рівні зворотнім струмам зворотнозміщеного p-n-переходу,
що дозволяє здійснювати керування за допомогою напруги (![]() = 0,5÷10
В) при досить незначній потужності;
= 0,5÷10
В) при досить незначній потужності;
· великий вхідний опір (107÷109 Ом), що є опором зворотнозміщеного p-n-переходу;
·
термостабільність, так як з ростом температури в
польовому транзисторі збільшується опір ![]() , що призводить до зниження струму
стоку.
, що призводить до зниження струму
стоку.
Основні недоліки польових транзисторів з керуючим p-n-переходом:
· у порівнянні із біполярними транзисторами мають меншу крутизну вихідної характеристики в лінійній області, що є недоліком при роботі в ключовому режимі;
·
залежність від температури (рис.1.16, б),
так як присутні зміни струму стоку ![]() , крутизни вихідної характеристики
та зворотного струму через затвор, і необхідність роботи близько до
термостабільної точки (т. А на рис.1.16, б);
, крутизни вихідної характеристики
та зворотного струму через затвор, і необхідність роботи близько до
термостабільної точки (т. А на рис.1.16, б);
·
наявність паразитних ємностей (![]() ≈1÷20
пФ), які треба враховувати, особливо при роботі в ключовому режимі.
≈1÷20
пФ), які треба враховувати, особливо при роботі в ключовому режимі.
На рис.1.17, а-в наведені основні схеми включення польових транзисторів.

Рис. 1.17 Основні схеми включення польових транзисторів:
а) із спільним витоком; б) із спільним затвором;
в) із спільним стоком (витоковий повторювач)
Найбільш типовою для польових транзисторів є
схема із спільним витоком (рис.1.17, а). Для схем з’єднання польових
транзисторів із спільним витоком та спільним затвором (рис.1.17, б) на
низьких частотах вихідний опір ![]() , а в схемі із спільним стоком (рис.1.17,
в)–
, а в схемі із спільним стоком (рис.1.17,
в)– ![]() .
.
Вхідний опір в схемах із спільним витоком та
стоком ![]() , а в схемі із спільним затвором –
, а в схемі із спільним затвором –
![]() .
.
Крутизна на витоко-затворних характеристиках дорівнює
![]() .
.
Максимальна крутизна будь-якого польового
транзистора визначається згідно виразу ![]() .
.
Крутизну можна також обчислити використовуючи вираз
![]() ,
,
де струм стоку рівний ![]() .
.
До основних параметрів польового транзистора відносяться:
![]() початковий
струм стоку;
початковий
струм стоку;
![]() напруга
відсічки;
напруга
відсічки;
![]() –
максимальна напруга сток-витік;
–
максимальна напруга сток-витік;
![]() –
максимальна напруга затвор-витік;
–
максимальна напруга затвор-витік;
![]() –
максимальна напруга затвор-сток;
–
максимальна напруга затвор-сток;
![]() –
максимальний стоковий струм;
–
максимальний стоковий струм;
![]() –
максимальна розсіювана потужність;
–
максимальна розсіювана потужність;
![]() зворотній
струм на затворі за даної напруги сток-витік;
зворотній
струм на затворі за даної напруги сток-витік;
![]() –
крутизна характеристики;
–
крутизна характеристики;
![]() –
максимальна робоча частота;
–
максимальна робоча частота;
![]() –
вхідна (між затвором і стоком) ємність;
–
вхідна (між затвором і стоком) ємність;
![]() – вихідна (між стоком та витоком)
ємність;
– вихідна (між стоком та витоком)
ємність;
![]() –
прохідна (між затвором та витоком) ємність;
–
прохідна (між затвором та витоком) ємність;
Як приклад, в табл. 1.5 приведено параметри двох польових транзисторів з керуючим p-n-переходом і каналом n-типу.
Таблиця 1.5
|
|
КП307Г |
BFQ10 |
|
|
8…24 |
– |
|
|
1,5…6 |
3.5 |
|
|
25 |
30 |
|
|
30 |
– |
|
|
30 |
30 |
|
|
25 |
10 |
|
|
250 |
250 |
|
|
1 (-10) |
0,1 (–) |
|
|
6…12 (10) |
1 (–) |
|
|
– |
– |
|
|
5 |
8 |
|
|
1,5 |
– |
|
|
– |
– |
На рис.1.18, а-б зображено основні структури MOSFET-транзисторів. Характерною особливістю польових MOSFET-транзисторів перед польовими транзисторами із керуючим p-n-переходом є наявність тонкого слою діелектрика між електродом затвора і робочою зоною напівпровідникового приладу, що забезпечує ще більший вхідний опір (1010÷1014 Ом).

Рис. 1.18 Структурні схеми n-канальних МДН-транзисторів:
а) із наведеним каналом провідності; б) із вбудованим каналом провідності
Усі MOSFET-транзистори поділяються на два основні класи:
1. Із наведеним каналом;
2. Із вбудованим каналом.
Як і польові транзистори із керуючим p-n-переходом усі MOSFET-транзистори також поділяються як на n-, так і p-типу, що визначається типом каналу, який наводиться або вбудований в підложку протилежного типу провідності.
На рис.1.19, а та б наведено основні вольт-амперні характеристики MOSFET-транзистора n-типу з наведеним каналом.

Рис. 1.19 Основні характеристики MOSFET-транзистора із наведеним каналом n-типу:
а) вихідна (стокова) характеристика; б) стоково-затворна характеристика.
В MOSFET-транзисторах із наведеним
каналом при наявності напруги ![]() та відсутності керуючої напруги (
та відсутності керуючої напруги (![]() )
струм стоку майже нульовий
)
струм стоку майже нульовий ![]() і зростає тільки починаючи з
певного значенні напруги затвор-витік
і зростає тільки починаючи з
певного значенні напруги затвор-витік ![]() (рис.1.19, б). В даному
типі транзисторів по мірі росту напруги затвор-витік (при
(рис.1.19, б). В даному
типі транзисторів по мірі росту напруги затвор-витік (при ![]() ) за рахунок
ефекту поля під поверхнею діелектрика у підложці утворюється збіднена на
основні носії область, а трохи глибше ОПЗ. Із подальшим ростом керуючої напруги
(
) за рахунок
ефекту поля під поверхнею діелектрика у підложці утворюється збіднена на
основні носії область, а трохи глибше ОПЗ. Із подальшим ростом керуючої напруги
(![]() )
на поверхні напівпровідника під затвором утворюється інверсійний прошарок
(рис.1.18, а), що і є каналом провідності. Як і у випадку із
транзисторами з керуючим p-n-переходом у даних транзисторах напруга на
затворі
)
на поверхні напівпровідника під затвором утворюється інверсійний прошарок
(рис.1.18, а), що і є каналом провідності. Як і у випадку із
транзисторами з керуючим p-n-переходом у даних транзисторах напруга на
затворі ![]() рівномірно регулює глибину каналу
провідності та ОПЗ, а значення струму стоку
рівномірно регулює глибину каналу
провідності та ОПЗ, а значення струму стоку ![]() – збільшує ширину
каналу від стоку до витоку. За деякого значення
– збільшує ширину
каналу від стоку до витоку. За деякого значення ![]() та напруги
та напруги ![]() (рис.1.19,
а) канал провідності біля сильнолегованої області стоку перекривається і
струм стоку досягає значення насичення, тобто опір каналу стає максимальним і
майже не змінюється
(рис.1.19,
а) канал провідності біля сильнолегованої області стоку перекривається і
струм стоку досягає значення насичення, тобто опір каналу стає максимальним і
майже не змінюється ![]() . Тобто MOSFET-транзистор
працює в режимі збагачення.
. Тобто MOSFET-транзистор
працює в режимі збагачення.
Як і транзистори із керуючим p-n-переходом
MOSFET-транзистори із наведеним каналом на вихідній характеристиці
(рис.1.19, а) мають омічну область (область I), область насичення
(область II) та область лавинного пробою (область III). Основні параметри MOSFET-транзисторів
відрізняються від основних параметрів польових транзисторів тільки відсутністю ![]() .
.
На рис.1.20, а-б приведено умовні позначення МДН-транзисторів із наведеним каналом.

Рис. 1.20 Умовне позначення MOSFET-транзистора із наведеним каналом:
а) n-типу; б) p-типу
На рис.1.21, а-б наведено основні вольт-амперні характеристики MOSFET-транзистора n-типу із вбудованим каналом.

Рис. 1.21 Основні характеристики MOSFET-транзисторів із вбудованим каналом:
а) – вихідна (стокова) характеристика; б) стоково-затворна характеристика.
В MOSFET-транзисторах із вбудованим
каналом за відсутності напруги затвор-виток (![]() ) як і в транзисторах із
керуючим p-n-переходом присутній початковий струм стоку
) як і в транзисторах із
керуючим p-n-переходом присутній початковий струм стоку ![]() ,
наявність якого пояснюється провідністю вбудованого каналу. В випадку MOSFET-транзистора
із вбудованим каналом n-типу (рис.1.18, б) зменшення напруги на
затворі (
,
наявність якого пояснюється провідністю вбудованого каналу. В випадку MOSFET-транзистора
із вбудованим каналом n-типу (рис.1.18, б) зменшення напруги на
затворі (![]() ) призводить до виводу електронів
із каналу провідності і збільшення ОПЗ. Відбувається процес збіднення і вже при
досягненні
) призводить до виводу електронів
із каналу провідності і збільшення ОПЗ. Відбувається процес збіднення і вже при
досягненні ![]() канал провідності транзистора
майже повністю перекривається, тобто
канал провідності транзистора
майже повністю перекривається, тобто ![]() . І навпаки, з зростом напруги на
затворі (
. І навпаки, з зростом напруги на
затворі (![]() ) канал провідності збагачується
основними носіями заряду.
) канал провідності збагачується
основними носіями заряду.
На рис.1.22, а-б приведено умовні позначення MOSFET-транзисторів із вбудованим каналом.

Рис. 1.22 Умовне позначення MOSFET-транзистора із вбудованим каналом:
а) n-типу; б) p-типу
За призначенням усі MOSFET-транзистори можна поділити на:
1. Малопотужні інтегральні транзистори, що використовуються в мікроелектроніці;
2. Малопотужні дискретні транзистори для підсилення, генерації і комутації;
3. Потужні транзистори для роботи в перетворювачах та підсилювачах.
Серед основних переваг MOSFET-транзисторів порівняно з польовими транзисторами із керуючим p-n-переходом слід відзначити:
· практична відсутність зворотних струмів через ізольований затвор (≥1 пA);
· ще більший вхідний опір (1010÷1014 Ом), що забезпечується діелектриком;
· ще більші робочі частоти (до ~2 ГГц);
·
більша крутизна вихідної характеристики (![]() 5÷40
мА/В);
5÷40
мА/В);
· можливість створення на базі MOSFET-транзисторів із наведеним каналом комутуючих елементів для великих потужностей;
· у випадку використання MOSFET-транзисторів із наведеним каналом, можливість використання однополярних імпульсів керування.
До основного недоліку MOSFET-транзисторів відноситься підвищений рівень шумів, внаслідок процесів на межі напівпровідник-діелектрик, тобто Si-SiO2).
Нижче в табл.1.6 наведено параметри двох MOSFET-транзисторів транзисторів із наведеним та двох MOSFET-транзисторів із вбудованим каналом.
Таблиця 1.6
|
|
із наведеним р-каналом |
з вбудованим n-каналом |
||
|
|
КП301Б |
2N3882 |
КП305Д |
3N98 |
|
|
2,7…5,4 |
3 |
6 |
6 |
|
|
20 |
30 |
15 |
32 |
|
|
– |
– |
±15 |
– |
|
|
30 |
20 |
±15 |
6 |
|
|
16 |
30 |
15 |
15 |
|
|
200 |
200 |
150 |
150 |
|
|
0,3 |
25 (–) |
1 |
– |
|
|
1 (15) |
1…25 (–) |
5,2...10,5 (10) |
1…3 (–) |
|
|
100 |
– |
250 |
– |
|
|
3,5 |
3 |
5 |
7 |
|
|
1 |
– |
0,8 |
– |
|
|
3,5 |
– |
– |
– |
|
|
|
– |
7,7 |
|
На рис.1.23, а зображено структуру потужного MOSFET-транзистора із наведеним n-каналом (англ. POWFET або POWER MOSFET), що має вертикальну структуру. Умовні позначення потужних MOSFET-транзисторів із наведеним каналом приведені на рис.1.23, б-в.
Рис. 1.23 Потужний MOSFET-транзистор із наведеним каналом:
а) структура транзистора; б) умовне графічне позначення транзистора n-типу;
в) умовне графічне позначення транзистора p-типу
За принципом дії даний тип транзисторів
подібний до MOSFET-транзисторів із наведеним n-каналом, за
винятком конструктивних особливостей побудови, що пов’язані із великою
потужністю (на кристалі площею 1 см2 вміщується та паралельно
з’єднується до 800 000 таких транзисторів). При прикладенні до такого n-канального
транзистора (рис.1.23, а) напруги сток-витік ![]() і прикладенні
до керуючого електроду позитивної напруги в р--зоні р-прошарку,
між сильно та слабо легованою n-зонами, утворюється інверсійний канал,
через який основні носії (електрони) від витоку надходять до дрейфової n--зони,
через яку вони дрейфують до вільної від заряду n+-зони, а
звідти до стоку. Тобто потужний вертикальний MOSFET-транзистор, як і
звичайний польовий транзистор, є уніполярним приладом.
і прикладенні
до керуючого електроду позитивної напруги в р--зоні р-прошарку,
між сильно та слабо легованою n-зонами, утворюється інверсійний канал,
через який основні носії (електрони) від витоку надходять до дрейфової n--зони,
через яку вони дрейфують до вільної від заряду n+-зони, а
звідти до стоку. Тобто потужний вертикальний MOSFET-транзистор, як і
звичайний польовий транзистор, є уніполярним приладом.
Потужні вертикальні MOSFET-транзистори
із наведеним каналом мають вихідну вольт-амперну характеристику (рис.1.24, а)
подібну до вихідної характеристики горизонтальних аналогів, проте
стоково-затворна характеристика (рис.1.24, б) у даного типу транзисторів
найчастіше більш лінійна та є симетричною відносно центру лінійної ділянки (![]() ).
).

Рис. 1.24 Основні характеристики потужних MOSFET-транзисторів із наведеним каналом:
а) вихідна (стокова) характеристика; б) стоково-затворна характеристика.
Завдяки малій зміні
крутизни характеристики (максимум ±20%) ці транзистори можливо підключати
паралельно із рівномірним розподілом струму між ними. При цьому можна суттєво
збільшити максимальний струм комутації, а саме паралельне з’єднання розглядати
як MOSFET-транзистор із сумарною крутизною ![]() та новим током
насичення
та новим током
насичення ![]() .
.
Однак при цьому неодмінно треба враховувати, що зростає сумарна паразитна ємність, яка обов’язково збільшить час переключання. Для реалізації мінімального часу (~20÷30 нс) переключання даний тип транзисторів повинен працювати від генераторів, що мають малий вихідний опір.
За сукупністю частотних, часових та енергетичних параметрів потужні MOSFET-транзистори із наведеним каналом переважають над потужними біполярними транзисторами, проте поступаються біполярним транзисторам із ізольованим затвором (БТІЗ, англ. IGBT), що розвилися на базі цих же потужних MOSFET-транзисторів.
Основні переваги потужних MOSFET-транзисторів із наведеним каналом:
· великі комутуючі потужності;
·
невеликий опір у ввімкненому стані (при напрузі
сток-витік до ![]() та струмі стоку не більше
та струмі стоку не більше ![]() );
);
· невелику потужність, що використовується для управління;
· відносно висока швидкодія у випадку використання одного транзистора (комутація струму 20 А за час ~70÷100 нс);
· можливість керування однополярними імпульсами.
Основні недоліки потужних MOSFET-транзисторів із наведеним каналом:
·
значне зростання опору на транзисторі у відкритому
стані при зростаючих значеннях напруги сток-витік ![]() >300 B;
>300 B;
· наявність в конструкції даних транзисторів паразитного діода сток-витік на межі р+- n-, який вносить додаткові втрати потужності у відкритому стані.
В табл.1.7. приведено основні параметри потужних MOSFET-транзисторів із наведеним каналом.
Таблиця 1.7
|
|
КП744А |
IRF520A |
|
|
2…4 |
2…4 |
|
|
100 |
100 |
|
|
– |
– |
|
|
20 |
20 |
|
|
9,2 |
8 |
|
|
60 |
40 |
|
|
– |
100 |
|
|
– |
2700 |
|
|
– |
– |
|
|
– |
370 |
|
|
– |
38 |
|
|
– |
95 |
Біполярний транзистор з
ізольованим затвором (БТІЗ, англ. IGBT) – це
повністю керований напівпровідниковий прилад, що є розвитком технології силових
MOSFET і суміщає в своїй структурі потужний MOSFET-транзистор із
наведеним каналом та вихідний біполярний каскад (рис.1.25, а). Тому
структура БТІЗ (рис.1.25, б) дуже подібна до структури потужних
МДН-транзисторів із наведеним каналом (потужних MOSFET) і відрізняється від
останніх наявністю ![]() зони перед колектором після
дрейфової
зони перед колектором після
дрейфової ![]() зони. Ввімкнення або вимкнення
БТІЗ виконується подачею і знаттям напруги між затвором і витоком MOSFET-транзистора
всередині структури (рис. 1.25, а).
зони. Ввімкнення або вимкнення
БТІЗ виконується подачею і знаттям напруги між затвором і витоком MOSFET-транзистора
всередині структури (рис. 1.25, а).
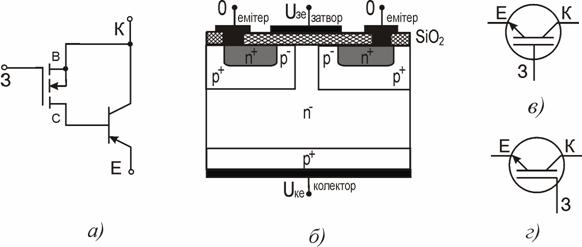
Рис. 1.25 Біполярний транзистор з ізольованим затвором БТІЗ (IGBT):
а) схематичне представлення IGBT у вигляді потужного МДН-транзистора і БТ;
б)традиційна структура біполярного транзистора з ізольованим затвором (IGBT);
в-г) умовні графічні позначення БТІЗ (IGBT)
Умовно БТІЗ
позначають одним із двох способів (рис.1.25, в-г). Як і в потужних
МДН-транзисторах із наведеним каналом, в момент включення БТІЗ, тобто при
подачі на колектор ![]() та на затвор
та на затвор ![]() позитивної
відносно емітера полярності напруги, в слаболегованій
позитивної
відносно емітера полярності напруги, в слаболегованій ![]() зоні
створюється інверсний канал провідності крізь який електрони від емітера
потрапляють в дрейфову зону і надходять до
зоні
створюється інверсний канал провідності крізь який електрони від емітера
потрапляють в дрейфову зону і надходять до ![]() області перед
колектором. Надходячи в сильно леговану позитивну область, електрони створюють
умови для інжектування дірок із
області перед
колектором. Надходячи в сильно леговану позитивну область, електрони створюють
умови для інжектування дірок із ![]() зони в
зони в ![]() зону.
Інжектовані дірки проходячи крізь дрейфову зону будуть надходити до
зону.
Інжектовані дірки проходячи крізь дрейфову зону будуть надходити до ![]() зони
емітера і потім безпосередньо в сам емітер.
зони
емітера і потім безпосередньо в сам емітер.
Таким чином процес відмикання біполярного транзистора можна розділити на два етапи: відкриття потужного MOSFET всередині структури БТІЗ та наступне за цим виникнення струму між колектором і емітером (відкриття біполярного транзистора в структурі БТІЗ).
Основні характеристики біполярного транзистора з ізольованим затвором (рис.1.26, а-б) схожі із характеристиками потужного MOSFET-транзистора та мають більш круту область насичення.

Рис. 1.26 Основні характеристики біполярного транзистора
з ізольованим затвором (БТІЗ) p-n-p-типу:
а) вихідна характеристика; б) перехідна характеристика.
По аналогії із вихідною характеристикою біполярних транзисторів, вихідна характеристика БТІЗ також має 3 робочі зони:
I. Область насичення, в яку БТІЗ переключається при відкриванні (точка А на рис.1.26, а);
II. Область підсилення, в якій використовується лише зона відсічки при запиранні даного транзистора (точка В на рис.1.26, б);
III. Область лавинного пробою.
Структура БТІЗ дозволяє сумістити найкращі переваги як БТ так і MOSFET-транзистора:
· високий вхідний опір транзистора при значному струмі навантаження;
· дуже малий опір даного типу транзистора у ввімкненому стані, внаслідок насичення високоомної n--зони транзистора основними носіями;
· відсутність явища вторинного пробою, що характерне для БТ;
· велика частота комутації (до 50 кГц);
· незначні втрати на комутацію дуже великих потужностей;
Основними недоліками біполярних транзисторів з ізольованим затвором є:
· більший час при закритті („хвіст” струму колектора) аніж при відкритті, внаслідок зворотного збіднення дрейфової зони на електрони;
· необхідність використання додаткових ланцюгів перемикання при частотах більше 10-20 кГц та при номінальних струмах більше 100 А;
На сьогоднішній день біполярні транзистори з ізольованим затвором використовуються в різних силових схемах виключно в ключовому режимі і можуть комутувати напруги від сотень вольт до декількох кіловольт та струми від десятків ампер до декількох кілоампер. Для БТІЗ з номінальними напругами в діапазоні 600-1200 В падіння напруги на транзисторі в повністю відкритому стані складає усього 1,5-3,5 В, що набагато менше аніж для потужних MOSFET-транзисторів із наведеним каналом, працюючих на цих же напругах. Потужні ключі випускаються у вигляді IGBT-модулів, що місять два або більше транзистора, з’єднаних паралельно, та різноманітні додаткові ланцюги (захисту, керування, тощо).
·
максимальний постійний струм колектора ![]() ;
;
·
максимальний імпульсний струм колектора ![]() ;
;
·
максимальна напруга колектор-емітер ![]() ;
;
·
максимальна розсіювана потужність ![]() ;
;
·
пробивна напруга колектор-емітер ![]() та
колектор-база
та
колектор-база ![]() ;
;
·
напруга колектор-емітер насичення ![]() ;
;
·
порогова напруга на затворі ![]() ;
;
·
струм колектора при нульовому значенні напруги на
затворі ![]() ;
;
·
заряди на затворі ![]() (сумарний),
(сумарний), ![]() (база-емітер),
(база-емітер),
![]() (база-колектор);
(база-колектор);
·
час затримки ввімкнення ![]() та вимикання
та вимикання ![]() ;
;
·
час наростання ![]() та спадання
та спадання ![]() фронту
фронту
В табл. 1.8 приведені основні параметри для двох БТІЗ.
Таблиця 1.8
|
|
КП731А |
IRG4PH40U |
|
|
40 |
41 |
|
|
80 |
82 |
|
|
600 |
1200 |
|
|
160 |
160 |
|
|
600 |
1200 |
|
|
– |
– |
|
|
3 |
2,5…3 |
|
|
5,5 |
3…6 |
|
|
250 |
2…250 |
|
|
80 |
86 |
|
|
10 |
13 |
|
|
42 |
29 |
|
|
26 |
24 |
|
|
240 |
220 |
|
|
37 |
24 |
|
|
230 |
180 |
1. Назвіть основні напівпровідникові області біполярного транзистора.
2. Назвіть робочі режими біполярного транзистора.
4. Які основні схеми включення біполярних транзисторів в схему. Які є найбільш використовуваними?
6. Яка із схем включення біполярного транзистора має найкращі показники по підсиленню струму?
8. Що є основним недоліком біполярних транзисторів?
9. Що відбувається із вхідними характеристиками при зміні температури в схемах включення біполярного транзистора із спільним емітером та базою
14. Чи є небезпечними для польових транзисторів підвищення температури?
15. Назвіть основні переваги та недоліки усіх польових транзисторів.
16. Які існують схеми включення польового транзистора в схему? Які є найбільш використовуваними?
17. Які типи МДН-транзисторів існують? Які їх конструктивні особливості?
18. Які відмінності між вольтамперними характеристиками цих типів МДН-транзисторів?
21. Чим характерна стоково-затворна характеристика даних транзисторів?
22. Що досягається паралельним з’єднанням потужних МДН-транзисторів? Що при цьому треба враховувати?
23. До яких значень напруг та струмів доцільно використовувати потужні МДН-транзистори?
24. Назвіть основні переваги та недоліки МДН-транзисторів.
25. Що конструктивно та функціонально відрізняє БТІЗ від потужного МДН-транзистора?
26. Як можна умовно представити БТІЗ?
28. Які найкращі переваги біполярного та потужного польового транзистора в собі суміщає БТІЗ?
29. Який діапазон роботи БТІЗ?
1.1.4. Групові з’єднання елементів
В потужних перетворювачах через обмежені можливості напівпровідникових структур використовують паралельне та послідовне з’єднання діодів, тиристорів або транзисторів. Неідентичність характеристик напівпровідникових приладів викликає суттєвий розкид струмів та напруг при їх груповому з’єднанні.
Для вирівнювання струмів поміж паралельно включеними приладами необхідно або підбирати прилади з однаковими прямими ВАХ з одночасним симетрируванням конструкції струмопровідних шин, або використовувати засоби примусового вирівнювання струмів за допомогою резистивних чи індуктивних дільників. По мірі вдосконалення технології виготовлення напівпровідникових приладів з'являється реальна можливість використання паралельного з’єднання без застосування спеціальних вирівнювальних елементів.
Якщо максимально допустимий середній струм
діоду ![]() менший за потрібне для роботи
перетворювача середнє значення струму вентиля
менший за потрібне для роботи
перетворювача середнє значення струму вентиля ![]() , то діоди треба
включати паралельно. Для визначення мінімального числа діодів
, то діоди треба
включати паралельно. Для визначення мінімального числа діодів ![]() , які
можна включити паралельно без вирівнювальних пристроїв, слід скористатися ВАХ
обраних діодів з урахуванням області можливих змін прямої вітки характеристики
при заданій температурі (рис.1.27, а). Такі характеристики наводяться в
довідниках та технічних умовах на діоди.
, які
можна включити паралельно без вирівнювальних пристроїв, слід скористатися ВАХ
обраних діодів з урахуванням області можливих змін прямої вітки характеристики
при заданій температурі (рис.1.27, а). Такі характеристики наводяться в
довідниках та технічних умовах на діоди.
Рис. 1.27 Групові з'єднання діодів:
а) область зміни ВАХ діода; б) послідовне з'єднання
Мінімальне число паралельно з'єднаних діодів визначають за формулою
![]() , (1.2)
, (1.2)
де ![]() середнє значення струму, що
протікає через паралельно з'єднані діоди;
середнє значення струму, що
протікає через паралельно з'єднані діоди; ![]() коефіцієнт завантаження
діода по струму ( звичайно
коефіцієнт завантаження
діода по струму ( звичайно ![]() );
); ![]() прирощення струму, яке
визначається по ВАХ діода.
прирощення струму, яке
визначається по ВАХ діода.
Якщо значення ![]() , яке отримане за
формулою (1.2), виходить дробовим, то його слід округлити до найбільшого цілого
числа.
, яке отримане за
формулою (1.2), виходить дробовим, то його слід округлити до найбільшого цілого
числа.
Якщо ![]() , то діоди треба включати
послідовно (рис.1.27, б). Число діодів, які необхідно включити
послідовно, визначають за формулою:
, то діоди треба включати
послідовно (рис.1.27, б). Число діодів, які необхідно включити
послідовно, визначають за формулою:
![]() (1.3)
(1.3)
При послідовному з’єднанні діодів їх необхідно шунтувати вирівнювальними резисторами, як це показано на рис.рис.1.27, б. Діоди зі зворотними струмами до 100 мкА рекомендується шунтувати резисторами із розрахунку 70 кОм на кожні 100 В амплітуди фактичної зворотної напруги, що прикладена до одного діода. Якщо зворотні струми діодів більші ніж 100 мкА, то рекомендується шунтувати їх резисторами із розрахунку 10-15 кОм на кожні 100 В зворотної напруги, прикладеної до одного діода.
Опір шунтуючого резистора ![]() , кОм:
, кОм:
![]() , (1.4)
, (1.4)
де опір ![]() дорівнює відповідно 70 або 10-15
кОм.
дорівнює відповідно 70 або 10-15
кОм.
Спад напруги на діодах ![]() на постійному
струмі становить 0,9-1 В для кремнієвих діодів та 0,5-0,6 В для діодів Шотки.
При послідовному з’єднанні діодів сумарний спад напруги на них та диференційний
опір пропорційно збільшуються.
на постійному
струмі становить 0,9-1 В для кремнієвих діодів та 0,5-0,6 В для діодів Шотки.
При послідовному з’єднанні діодів сумарний спад напруги на них та диференційний
опір пропорційно збільшуються.
1.1.5. Силові інтелектуальні модулі
Одна з основних тенденцій сучасної мікроелектроніки - це збільшення ступеня інтеграції, об'єднання на одному кристалі або в одному корпусі максимальної кількості компонентів для повного вирішення якого-небудь завдання. В області силової техніки ця тенденція привела у свій час до розробки силових модулів півмостових і мостових конфігурацій.
Найвищим досягненням інтегральної силової техніки на сьогодні є створення інтелектуальних силових модулів IPM (Intelligent Power Module), потужних імпульсних високовольтних підсилювачів, керованих сигналами системи управління.
Сучасний IPM - це гібридний модуль, що містить:
· швидкісні IGBT-транзистори, з'єднані в певній конфігурації;
· схему керування, оптимізовану по характеристиках управління затвора для даних транзисторів;
· схему захисту від перевантажень;
· схему індикації стану.
Для надійної роботи модуля схема захисту повинна бути здатною аналізувати режим перевантаження по струму (overload), режим короткого замикання навантаження (SC - short circuit), режим пробою (breakdown), а також падіння напруги керування (UVLO - Under Voltage LockOut) і перегрів (overheat).
Застосування ІPM у порівнянні зі звичайними модулями набагато спрощує проведення розробки перетворювачів. Як правило, для роботи з ІPM необхідні один або декілька гальванічно ізольованих джерел живлення (або одне багатоканальне джерело) і гальванічно ізольований інтерфейс для зв'язку з контролером керування. Кількість вторинних джерел живлення залежить від конфігурації модуля. Для потужних модулів найбільш раціонально використати окреме джерело для кожного силового ключа. Це дозволяє усунути проблеми, пов'язані із шумами й перешкодами, які створюються при комутаціях потужних струмів.
Вартість IPM у багатьох випадках виявляється вищою, ніж вартість набору дискретних комплектуючих, здатних вирішити те ж саме завдання. Однак підвищення надійності, спрощення процесу зборки, зниження масо-габаритних показників варті того, щоб використати у своїй розробці саме інтелектуальний силовий модуль.
У табл.1.9. наведені граничні характеристики модулів IGBT різних виробників.
Таблиця 1.9
|
Виробник |
Граничний струм при напрузі |
Граничний струм |
|||||
|
600 |
1200/1400 |
1700 |
2400 |
3300 |
6(7) -pack |
IР |
|
|
ABB |
— |
300 |
225 |
1300 |
— |
300 |
— |
|
DYNEX SEMICONDUCTOR |
500 |
2400 |
2400 |
— |
1200 |
— |
— |
|
EUROCOMP / APT |
100 |
55 |
- |
- |
- |
- |
- |
|
Fairchild Semiconductor |
300 |
100 |
60 |
- |
- |
100 |
50 |
|
Fuji Electric |
300 |
800 |
- |
- |
- |
- |
100 |
|
Hitachi |
600 |
600 |
1800 |
1200 |
1200 |
150 |
— |
|
EUPEC |
300 |
2400 |
300 |
500 |
500 |
150 |
— |
|
International Rectifier / Omnirel |
500 |
400 |
- |
- |
- |
- |
- |
|
Intersil / Harris |
50 |
30 |
- |
- |
- |
- |
- |
|
IXYS Semiconductor |
90 |
670 |
30 |
- |
- |
85 |
- |
|
Mitsubishi Electric |
800 |
1000 |
- |
- |
- |
100 |
800 |
|
SEMIKRON |
1600 |
2800 |
2000 |
- |
- |
600 |
1200 |
|
STMicroelectronics |
50 |
50 |
- |
- |
- |
- |
- |
|
Toshiba |
800 |
1000 |
1800 |
- |
- |
50 |
300 |
Гранична напруга більшості інтелектуальних силових модулів, що випускають, становить 1200 або 1700 В, що є оптимальним значенням для безпечної роботи від промислової мережі 380 В.
На рис.1.28 наведена типова структурна схема базового інтелектуального модуля.
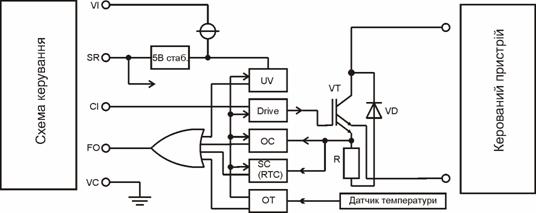
Рис. 1.28 Типова структурна схема базового інтелектуального модуля.
Вона включає в себе наступні блоки:
· SC – захист від короткого замикання;
· RTC - схема контролю струму в реальному часі;
· ОС – захист від перенавантаження по струму;
· UV – схема живлення ланцюгів захисту і блокування по напрузі;
· ОТ – датчик температури;
· Drive – драйвер;
· 5В стаб. – стабілізатор напруги 5В.
Схема захисту IPM визначає стан перенавантаження та короткого замикання (захист RTC), перевищення напруги насичення, падіння напруги живлення (контроль живлення і UVLO) і температуру кристала (датчик перегріву). При відхиленні від норми будь-якого із перерахованих параметрів схема захисту відключає силовий транзистор і видає сигнал несправності. По цьому сигналу схема керування відключає силові транзистори. Також модуль може мати вбудований супресор (обмеження) для захисту від імпульсних перевантажень.
При перегріві модуля вище заданого значення, датчик температури видає сигнал несправності. У півмостових і мостових конфігураціях звичайно відключаються транзистори нижнього рівня. Після охолодження модуля до порогової температури, відбувається повторне включення Однак, наявність теплового захисту не може гарантувати те, що потужний кристал не вийде з ладу ні при яких умовах. Кристал може перегрітись до того, як розігріється основа модуля і термодатчик. Це може статися, наприклад, при великих імпульсних або короткотривалих перевантаженнях.
В ІPM, як правило, використовуються ІGBT транзистори з вбудованим датчиком струму. Якщо струм колектора модуля перевищує граничне значення протягом певного часу, модуль відключається. Звичайно "інтелектуальні" схеми керування розрізняють два граничних значення струму - струм перевантаження, починаючи з якого формується контрольний сигнал, і струм КЗ, по якому відбувається відключення.
Після виникнення стану перевантаження напруга
на затворі знижується, що приводить до зменшення струму колектора. Якщо стан
перевантаження не припиняється, то через 5-10 мкс напруга на затворі знижується
до нуля. При цьому зниження напруги на затворі здійснюється за певним законом:
а саме відбувається "м'яке" відключення, яке необхідно для зменшення
значення ![]() і зниження перехідної перенапруги
при вимиканні.
і зниження перехідної перенапруги
при вимиканні.
У сучасних ІPM застосовується безперервний моніторинг струму кожного силового ключа й загального струму споживання. Це необхідно для визначення різних видів струмових перевантажень, включаючи пробій на корпус. Стан КЗ наступає при замиканні навантаження або збою контролера, коли відкриваючі сигнали надходять на обидва плеча півмостового каскаду, що викликає наскрізний струм. При цьому вимірюється безпосередньо струм силового каскаду, а не напруга насичення. Якщо струм колектора досягає граничного значення, процес відключення здійснюється миттєво, але з використанням "м’якого" відключення.
Для зниження часу затримки між моментом виявлення стану КЗ і моментом відключення в сучасних ІPM використається так звана схема RTC - схема контролю струму в реальному часі (RTC - real tіme current control). Цей пристрій працює паралельно драйверу, "обходячи" всі стадії його роботи в режимі КЗ і знижуючи час обробки сигналу до 100 нс.
Використання схеми RTC дозволяє зменшити час обробки сигналу струмового перевантаження та відповідно зменшити струм короткого замикання.
В сучасних IPM використовується також технологія контролю виходу силового транзистора із стану насичення. Такий захист базується на порівнянні напруги стоку транзистора із опорною. У разі виходу транзистора із насичення, запускається алгоритм вимикання транзистора із заданими часовими показниками.
1.2. Резистори
1.2.1. Класифікація і загальна характеристика резисторів
Резистор (англ. resistor, від лат. Resisto – опираюсь) – пасивний елемент електричного кола, що в ідеалі характеризується лише опором електричному струму, тобто для ідеального резистора у любий момент має виконуватись закон Ома: миттєве значення напруги на резисторі пропорційне струму через нього.
Але на практиці резисторам в тій чи іншій мірі притаманні також паразитна ємність, паразитна індуктивність та нелінійність вольт-амперної характеристики.
В електронній схемотехніці резистори призначені для забезпечення необхідних режимів роботи активних напівпровідникових і вакуумних компонентів, а також для розподілення напруг і струмів в елементах схеми.
Резистори поділяються на дві групи: з постійним опором та зі змінним опором.
Резистори зі змінним опором – це прилади, величина опору яких змінюється механічним шляхом (потенціометри, реостати). До цієї групи відносять також підстроюванні резистори, величина яких встановлюється один раз в процесі налагодження електронного приладу.
Резистори класифікують за такими ознаками:
1.1. Загального призначення – використовуються у якості навантажень активних елементів, дільників у колах живлення, елементів фільтрів, шунтів.
1.2. Спеціальні:
1.2.1. Прецизійні – відрізняються високою стабільністю параметрів в процесі їх експлуатації та високою точністю виготовлення (допуски задаються з точністю від ± 0,05% до ± 0,0005%). Застосовуються у вимірювальних пристроях, обчислювальній техніці. Діапазон номінальних опорів значно ширше, ніж резисторів загального призначення, а діапазон розсіюваних потужностей – навпаки, значно менше, що забезпечує їх високу точність.
1.2.2. Високочастотні – відрізняються малою власною індуктивністю та ємністю. Призначені для використання у високочастотних колах (від 10 МГц до 18 ГГц), кабелях, хвильоводах, а також як направлені відгалужувачі та еквіваленти антен.
1.2.3. Високовольтні – розраховані на роботу під високими напругами (від одиниць до десятків кВ). Їх використовують для ділення, поглинання напруги в розрядних і високовольтних колах.
1.2.4. Високоомні – мають діапазон номінальних опорів від десятків МОм до одиниць ТОм. Призначені для використання в вимірювальній техніці і високочутливих приладах. Їх потужності розсіювання невеликі (до 0,5 Вт).
2. Захист від зовнішніх факторів:
2.1. Неізольовані – з покриттям, або без нього, не допускають дотикання своїм корпусом шасі апаратури.
2.2. Ізольовані – мають ізоляційне покриття (лак, компаунд, пластмаса) і допускають дотикання до корпуса шасі та струмоведучих частин радіоелектронної апаратури.
2.3. Герметизовані – мають герметичну конструкцію корпуса, яка виключає вплив навколишнього середовища на його внутрішній простір. Герметизація використовується за допомогою опресовки спеціальним компаундом.
2.4. Вакуумні – мають резистивний елемент, що поміщений у скляну вакуумну колбу.
3. Спосіб монтажу: начіпний, поверхневий, для мікромодулів та інтегральних мікросхем;
4. Матеріал резистивного елемента:
4.1. Проволочні – резистори, в яких резистивним елементом є високоомний провід (виготовляються з високоомних сплавів: константан, ніхром, нікелін). Представляють собою відрізок проводу з високим питомим опором, що намотаний на який-небудь каркас. Можуть мати значну паразитну індуктивність.
4.2. Металофольгові – аналогічні дротовим, але навиті з металічної фольги.
4.3. Плівкові металічні – представляють собою тонку плівку металу з високим питомим опором, що напилена на керамічне осердя. На кінці осердя надіті металічні ковпачки з дротовими виводами. Іноді, для підвищення опору, у плівці прорізається канавка. Це найбільш розповсюджений тип резисторів.
4.4. Вугільні – бувають плівкові та об’ємні. Використовують високий питомий опір графіту.
4.5. Напівпровідникові – використовується опір слаболегованого напівпровідника. Ці резистори можуть мати велику нелінійність вольт-амперної характеристики. Використовуються у складі інтегральних мікросхем, де застосувати інші типи резисторів важче.
5. Конструкція:
5.1. Одноелементні та багатоелементні.
5.2. З круговим та лінійним переміщенням рухомого контакту.
5.3. Однообертові та багатообертові.
5.4. З обмеженим і необмеженим діапазоном переміщення рухомого контакту.
5.5. З фіксацією і без фіксації рухомої частини.
1.2.2. Зовнішній вигляд та позначення резисторів
Нижче у якості прикладів наведені позначення та зовнішній вигляд резисторів деяких фірм-виробників.
Маркування резисторів фірми PHILIPS:
|
Металоплівкові резистори-запобіжники |
Металоплівкові загального призначення |
Товстоплівкові, високоомні, високовольтні (> 10 МОм; > 1кВ) |
Металоплівкові потужні (1 Вт / 2 Вт) |
||
|
Опір: 12 кОм ± 5% |
Опір: 12 кОм ± 5% |
Опір: 2,7 МОм ± 5% |
Опір: 82 кОм ± 5% |
||
|
|
|
|
|||
|
Металоплівкові прецизійні |
|||||
|
|
Опір: 47 кОм ± 10% |
Опір: 390 кОм ± 10% ТКО: ± 50 ppm/ºC |
|
||
Маркування фірми CORNING GLASS WORK (CGW):
|
Проволочні резистори промислового використання |
Проволочні вогнестійкі резистори |
|
Опір: 2,4 Ом |
Опір: 220 кОм |
|
Вогнестійкі резистори типу Anti-Pulse |
Високоякісний плівковий резистор типу ERDAS3 для звукової техніки |
Металоокисний плівковий резистор-запобіжник |
|
Опір: 220 кОм |
Опір: 220 кОм ± 0,1% |
Опір: 220 кОм ± 1% |
Багато фірм випускають в якості плавких вставок або перемичок спеціальні проводи з нормованим опором і діаметром (0,6 мм; 0,8 мм) і резистори з “нульовим” опором.
Резистори виконують у стандартному циліндричному корпусі з гнучкими виводами (Zero-Ohm) або в стандартному корпусі для поверхневого монтажу (Jumper-Chip). Реальні значення опору таких резисторів лежать в діапазоні від одиниць до десятків мОм (» 0,005…0,05 Ом).
|
Zero-Ohm (кераміка-метал) |
Jumper-Chip |
|
R £ 13 мОм |
R £ 50 мОм |


Набори резисторів – це сукупність резисторів, об’єднаних в одну конструкцію у вигляді мікросхеми. Вони класифікуються за своїм призначенням, за типом резистивного елемента, за схемотехнічною побудовою.
Розподіл наборів за призначенням і типом резистивного елемента співпадає з постійними резисторами. Особливість полягає лише в їх схематичному з’єднанні.
Простий набір резисторів – набір постійних резисторів, які можуть бути з’єднаними або не з’єднаними в електричну схему;
Функціональний набір резисторів – це набір постійних резисторів, що має функціональну залежність між вхідним і вихідним сигналами;
Комбінований набір резисторів – це набір, який містить постійні і змінні резистори.
Система умовних позначень резисторів має скорочене позначення і складається з трьох груп символів, які приведені в табл.1.9.
На резистори наноситься буквено-цифрова або кольорова маркування. Буквенне маркування містить: номінальну потужність; номінальний опір; допуск і дату виготовлення. Номінальний опір позначається цифрами з вказівкою одиниці виміру (Ом – оми; кОм (К) – кілооми; МОм (М) – мегаоми; ГОм (G) – гігаоми; ТОм (Т) – тераоми.)
Наприклад: 220 Ом; 680 К; 3М3 (буква фактично
означає множник 1, 10![]() , 10
, 10![]() , 10
, 10![]() , 10
, 10![]() і
визначає положення коми десяткового знака).
і
визначає положення коми десяткового знака).
Допуск визначається або в цифровій формі, або в відповідній до неї буквеній кодировці (±20% - М; ±10% - К; ±5% - I; ±2% - G; ±1% - F; ±0,5% - D ; ±0,25% - E; ±0,1% - B).
Таблиця 1.10
|
Група символів |
Приклад позначення |
||
|
I |
II |
III |
|
|
Р–резистори постійні РП – резистори змінні ТР – терморезистор з від’ємним ТКО ТРП– терморезистор з позитивним ТКО ВР – варистори постійні ВРП – варистори змінні |
1 - непроволочні 2 - проволочні, на основі металевої фольги На напівпровідникові матеріали позначень немає |
Порядковий номер розробки |
P1-26 - постійний непроволочний резистор з номером розробки 26
ТР-7 - терморезистор з від’ємним ТКО з номером розробки7
ВРП-14 - варистор змінний з номером розробки 14 |
Система умовних позначень наборів резисторів регламентується галузевими стандартами і вимагає пояснень, які приводяться в довідниковій літературі і технічній документації.
1.2.3. Основні параметри резисторів
1.2.3.1. Номінальний опір і допуски
Номінальний опір – це електричний опір, значення якого позначено на резисторі або вказано в нормативній документації і який є початковим значенням для відліку відхилень від цього значення.
Діапазони номінальних опорів встановлені міжнародними стандартами і мають наступні обмеження:
для постійних резисторів – від долів ома до одиниць тераома;
для змінних дротових – від 0,47 Ом до 1 МОм;
для змінних недротових – від 1 Ома до 10 МОм.
Ряди опорів стандартизовані і мають слідуючи умовні позначення: E6; E12; E48; E96; E192.
Цифра після букви Е вказує на кількість номінальних значень опорів резисторів в десятковому інтервалі.
В табл. 1.11 наведені опори по ряду Е6; Е12; Е24.
Таблиця 1.11
|
Е6 |
Е12 |
Е24 |
Е6 |
Е12 |
Е24 |
|
1,0 |
1,0 |
1,0 |
3,0 |
3,3 |
3,3 |
|
|
|
1,1 |
|
|
3,6 |
|
|
1,2 |
1,2 |
|
3,9 |
3,9 |
|
|
|
1,3 |
|
|
4,3 |
|
1,5 |
1,5 |
1,5 |
4,7 |
4,7 |
4,7 |
|
|
|
1,6 |
|
|
5,1 |
|
|
1,8 |
1,8 |
|
5,6 |
5,6 |
|
|
|
2,0 |
|
|
6,2 |
|
2,2 |
2,2 |
2,2 |
6,8 |
6,8 |
6,8 |
|
|
|
2,4 |
|
|
7,5 |
|
|
2,7 |
2,7 |
|
8,2 |
8,2 |
|
|
|
3,0 |
|
|
9,1 |
Ряд допустимих відхилень також нормалізований. Допуски вказуються у відсотках в відповідності з верхнім рядом табл. 1.11. Допустимі відхилення кодуються буквами (див. табл. 1.12).
Таблиця 1.12.
|
Допустиме відхилення, % |
± 0,001 |
± 0,002 |
± 0,005 |
± 0,01 |
± 0,02 |
± 0,05 |
± 0,1 |
± 0,25 |
|
Кодове позначення |
E |
L |
R |
P |
U |
X |
B |
C |
|
Допустиме відхилення, % |
± 0,5 |
± 1 |
± 2 |
± 5 |
± 10 |
± 20 |
± 30 |
|
|
Кодове позначення |
D |
F |
G |
I |
K |
M |
N |
|
1.2.3.2. Номінальна потужність і максимально допустима напруга.
Номінальна потужність – це найбільша потужність, яку резистор може розсіювати в заданих умовах на протязі гарантованого терміну роботи при параметрах, що задані допусками.
Величина розсіюваної потужності залежить від великої кількості факторів. Для кожного типу резистора приводяться в відповідній документації залежності допустимої потужності від оточуючої температури у вигляді графіка, що приводиться на рис. 1.29.

Рис. 1.29 Залежність допустимої потужності від оточуючої температури
Величина розсіюваної потужності Р в процесі експлуатації обмежується температурою
оточуючого середовища і величиною електричного навантаження. На приведеній на
рис. 1.29 залежності регламентуються три точки: ![]() нижня межа робочих
температур;
нижня межа робочих
температур; ![]() верхня межа робочих температур;
верхня межа робочих температур; ![]() максимально
допустима температура, при якій експлуатація не допускається.
максимально
допустима температура, при якій експлуатація не допускається.
Ряд потужностей резисторів стандартизований і має такі номінали (Вт): 0,01; 0,025; 0,05; 0,062; 0,125; 0,25; 0,5; 1; 2; 3; 4; 5; 8; 10; 16; 25; 40; 63; 80; 100; 160; 250; 500.
Потужність, що розсіюється на резисторі, обчислюється за допомогою типових формул:
![]()
Слід пам’ятати, що для високоомних резисторів може виникнути ситуація, коли прикладена до них напруга хоча й не забезпечує номінальну електричну потужність, що виділяється на резисторі, але може привести до електричного пробою робочої області. Тому для резисторів задаються максимально допустимі робочі напруги, які також стандартизовані і задаються рядом (В): 25; 50; 100; 150; 200; 250; 750; 1000; 1500; 2500; 3000; 4000; 5000; 10000; 20000; 25000; …
1.2.3.3. Температурний коефіцієнт опору (ТКО)
ТКО – характеризує зворотну зміну величини опору резистора при зміні температури на 1° С.

де ![]() номінальна величина опору
резистора при умовах експлуатації, що задані в ТЗ (здебільшого це температура
20°С, а в пакетах віртуальних лабораторій - 27°С);
номінальна величина опору
резистора при умовах експлуатації, що задані в ТЗ (здебільшого це температура
20°С, а в пакетах віртуальних лабораторій - 27°С);
![]() позитивний
або негативний приріст відповідно опору та температури.
позитивний
або негативний приріст відповідно опору та температури.
Чим менший ТКО, тим кращий резистор з точки зору експлуатації.
Значення ТКО прецизійних резисторів лежать в межах (1 ± 100)×10-6 ° С-1, а резисторів загального призначення (10 - 2000)×10-6 ° С-1.
1.2.3.4. Шуми резисторів
Будь-які резистори мають теплові шуми. Вони з’являються внаслідок теплового руху носіїв заряду (електронів) всередині твердого тіла. Їх середня потужність визначається за формулою Найквіста:
![]()
де k – постійна Больцмана; Т – температура по Кельвіну; ![]() - діапазон частот заміру шумових
характеристик.
- діапазон частот заміру шумових
характеристик.
Діюча величина напруги шумів, що може бути заміряна на резисторі, пов'язана з Рш залежністю:
![]()
Інша природа шумів – це струмові шуми, які появляються внаслідок протікання струму через резистори. Діюче значення напруги цих шумів оцінюється за наближеною формулою:
![]()
де R1 – постійний
параметр; U – постійна напруга, що виділяється на резисторі; ![]() -
верхня і нижня частоти діапазону, в якому визначається шумова напруга.
-
верхня і нижня частоти діапазону, в якому визначається шумова напруга.
Основні причини появи струмових шумів – це часові зміни об’ємної концентрації електронів, а також зміна контактних опорів між зернами провідникової структури резистора.
Значення шумів у недротових резисторів знаходиться в межах (1-5) мкВ в частотному діапазоні 60 Гц – 6 кГц.
У змінних резисторах рівень шумів зростає до 50 мкВ.
Дротові резистори мають рівень шумів в межах 0,1 мкВ.
Реально шумова напруга резисторів має характер “білого” шуму, тобто це безперервний спектр напруг в заданому частотному діапазоні. При послідовному чи паралельному з’єднанні n резисторів еквівалентна шумова напруга визначається за формулою:
 ,
,
де U2ші – середньоквадратичне значення шумів і-го резистора; N – кількість резисторів, що використовуються на досліджуваній ділянці схеми.
1.2.3.5. Частотні властивості резисторів
При використанні резисторів на високих
частотах необхідно враховувати наявність паразитних реактивних елементів. Тому
на високих частотах еквівалентна схема резисторів включає в себе індуктивність ![]() і
ємність
і
ємність ![]() (рис.1.30). При цьому необхідно
враховувати можливі резонансні напруги або струми, а також реактивну складову
напруг та струмів резистора. Реально значення
(рис.1.30). При цьому необхідно
враховувати можливі резонансні напруги або струми, а також реактивну складову
напруг та струмів резистора. Реально значення ![]() і
і ![]() невідомі і їх величини в значній
мірі залежать від монтажу електронної схеми. Під час монтажу резистора на платі
між його виводами та загальним проводом також виникають паразитні ємності
невідомі і їх величини в значній
мірі залежать від монтажу електронної схеми. Під час монтажу резистора на платі
між його виводами та загальним проводом також виникають паразитні ємності ![]() , що
показані на рис.1.30.
, що
показані на рис.1.30.
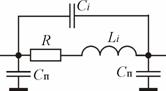
Рис. 1.30 Схема заміщення високочастотного резистора
з паралельною ємністю виводів.
Іноді в технічній документації на резистори приводиться
узагальнена постійна часу резистора ![]() . Наприклад, для резисторів типу
МЛТ
. Наприклад, для резисторів типу
МЛТ ![]() с.
с.
Металоплівкові резистори мають велику послідовну індуктивність, що створює недопустимий реактивний опір на частотах у декілька ГГц. Окрім індуктивності існує також інший реактивний елемент – паралельна ємність, що виникає між металічним виводом та тілом резистора, яке розташоване на керамічному діелектрику.
Дротові резистори на високих частотах також змінюють величину активної складової опору в зв’язку з явищем поверхневого ефекту, але воно починає проявлятись на частотах понад 1 МГц.
1.2.3.6. Функціональні характеристики
Для резисторів зі змінним опором визначають залежність опору резистора від положення рухомого контакту. На рис.1.31 наведені основні типи функціональних залежностей, які широко використовуються на практиці. Характеристика Б – логарифмічна, а характеристика В – зворотно-логарифмічна. Використання резисторів з тими чи іншими характеристиками залежить від необхідного характеру зміни вихідних сигналів.
Рис. 1.31 Основні типи функціональних залежностей опору резистора
від положення рухомого контакту
1. Наведіть загальну класифікацію резисторів.
2. Як класифікують резистори за призначенням?
3. Як класифікують резистори по захисту від зовнішніх факторів?
4. Як класифікують резистори по матеріалу резистивного елемента?
5. Наведіть умовні позначення резисторів.
6. Назвіть набори резисторів та їх типи.
7. Назвіть основні параметри резисторів.
8. Що таке номінальний опір і допуски резисторів?
9. Що таке номінальна потужність і максимально допустима напруга?
10. Як визначається температурний коефіцієнт опору резисторів?
11. Поясніть, що таке шуми резисторів та їх природу.
12. Поясніть частотні властивості резисторів.
13. Поясніть функціональні характеристики резисторів.
14. Зобразіть схему заміщення резистора на високих частотах.
1.3. Конденсатори
1.3.1. Загальна характеристика конденсаторів
Конденсатори відносяться до одних з найбільш розповсюджених елементів електронної схемотехніки. Їх характеристики та конструкція багато в чому залежать від типу діелектрика.
Конденсатор - це система з двох або більше електродів (обкладок), що розділені діелектриком. Така система характеризується ємністю та здатна зберігати електричний заряд. Класифікація конденсаторів наведена на рисунку 1.32.

Рис. 1.32 Класифікація конденсаторів
Електричні конденсатори розділяють на дві великі групи:
1. силові, що використовуються в електротехнічних та електроенергетичних установках;
2. конденсатори, що використовуються в електронних та радіотехнічних приладах.
1.3.2. Силові конденсатори
Силові конденсатори класифікуються відповідно з їх функціональним призначенням, за родом напруги та конструктивному виконанню.
По функціональному призначенню поділяються на конденсатори:
1. для збільшення коефіцієнта потужності електроустановок змінного струму;
2. подовжньої ємнісної компенсації ліній електропередачі та регулювання напруг в розподільчих мережах;
3. високочастотного зв’язку та захисту ліній електропередачі високої напруги;
4. відбору потужності від ліній електропередачі високої напруги;
5. для дільників напруги;
6. електротермічні (постійної ємності та підстроюванні з дискретним регулюванням значення ємності) високої та промислової частоти;
7. фільтрові;
8. вимірювальні;
9. для пуску та роботи електродвигунів змінного струму;
10. 10) для силової та напівпровідникової техніки (комутуючі, демпфуючі, фільтруючі, компенсуючi).
За типом напруг розрізняють конденсатори для роботи:
1. при змінній напрузі (синусоїдальної та несинусоїдальної форми) промислової та непромислової частоти;
2. при пульсуючій напрузі;
3. при імпульсній напрузі.
По конструктивному виконанню розрізняють конденсатори з
1. паперовим, плівковим та комбінованим діелектриком;
2. металізованим та фольгованими (прихованими та виступаючими) обкладками;
3. зі вмонтованими плавкими запобіжниками та без запобіжників;
4. з ізольованим корпусом, або з корпусом під робочою напругою;
5. з металічними та неметалічними корпусами прямокутної або циліндричної форми;
6. однофазні та трифазні.
За умовами охолодження розрізняють конденсатори:
1. з природним охолодженням;
2. примусовим повітряним охолодженням;
3. примусовим рідинним охолодженням.
1.3.3. Конденсатори для електронних та радіотехнічних приладів Такі конденсатори класифікуються за наступними ознаками:
1. конденсатори постійної ємності;
2. конденсатори змінної ємності.
1. з механічним (плавним та дискретним)
2. з електричним керуванням значення ємності (сегнетокерамічні - вариконди та напівпровідникові - варикапи)
В залежності від призначення, конденсатори розділяються на дві великі групи: загального та спеціального призначення.
В групу загального призначення входять низьковольтні конденсатори. Решта конденсаторів відноситься до спеціальних:
1. високовольтні;
2. перешкодоподавляючі;
3. дозиметричні.
1.3.3.1. Високовольтні конденсатори (1600-10 000В)
Виготовляються з використанням кераміки і слюди. За призначенням вони можуть бути як першого, так і другого типу, тобто як високочастотними, так і низькочастотними. Основним параметром для високовольтних низькочастотних конденсаторів є питома енергія, тому кераміка, що використовується в них, повинна мати високу діелектричну проникливість. Для високочастотних конденсаторів основним параметром є допустима розсіювана потужність, що характеризує навантажувальну здібність конденсаторів при наявності високих напруг підвищеної частоти. Для збільшення реактивної потужності вибирають кераміку з малими втратами, а конструкцію створюють з урахуванням протікання великих струмів.
Високовольтні конденсатори розділяють на високовольтні постійної напруги і на імпульсні. В якості діелектрика в перших з них використовують папір, полістирол, фторопласт, лавсан, а також їх комбінації.
Високовольтні імпульсні здебільшого виготовляють на основі паперового і комбінованого діелектриків. Такі конденсатори поряд з великими ємностями і великою механічною міцністю повинні допускати швидкі розряди. Тому їх власна індуктивність повинна бути малою, щоб не спотворювати форму імпульсів.
Дозиметричні конденсатори працюють в колах з низьким струмковим навантаженням. Тому вони повинні мати дуже малий саморозряд, великий опір ізоляції і, відповідно, високу постійну часу. Це, здебільшого, фторопластові конденсатори.
1.3.3.2. Перешкодоподавляючі конденсатори (0,001-4,7мкФ)
Призначенні для зниження електронних перешкод в широкому частотному діапазоні. Вони повинні мати малу власну індуктивність, внаслідок чого підвищується резонансна частота і смуга придушуємих частот. До того ж, вони повинні мати високу електричну стійкість ізоляції.
Перешкодоподавляючі конденсатори розділяють на опорні і прохідні. Їх головне призначення – придушувати індустріальні і високочастотні перешкоди, що створюються промисловими і побутовими приладами, випрямлячами, радіоелектронними пристроями. Ці конденсатори використовують у фільтрах низьких частот.
Опорні конденсатори – це конденсатори, один з виводів яких є опорна металева пластина з різьбовим кріпленням.
Прохідні конденсатори роблять коаксіальними, один з виводів яких – це струмонесучий стрижень, по якому протікає повний струм зовнішнього кола. Прохідні конденсатори мають конструкцію трубчатого або дискового типу в вигляді багатошарових монолітних шайб.
1.3.3.3. Конденсатори загального призначення (50-1000В)
Мають уніполярну провідність, внаслідок чого їх експлуатація можлива тільки при позитивному потенціалі на аноді. Номінальна ємність складає 0,001 - 220 мкФ. Такі конденсатори можуть бути: рідинними; об’ємно-пористими; оксидно-напівпровідниковими.
1. газові;
2. вакуумні;
3. рідинні;
4. тверді неорганічні (керамічні, склокерамічні, склоемалеві, склоплівкові, з неорганічних плівок, слюдяні);
5. органічні (паперові, металопаперові, фторопластові, поліетіленфталатні, полістирольні, полікарбонатні);
6. окисні (електролітичні, окисно-напівпровідникові, окисно-металеві).
Конденсатори з газовим діелектриком розділяються на постійні і змінні. В якості діелектрика в них використовується повітря, газ (азот, фреон, елегаз) або вакуум. Особливість газових конденсаторів – це мале значення тангенса кута діелектричних втрат (до 10-5) і висока стабільність електричних параметрів. Тому їх переважними галузями використання є високовольтна і високочастотна апаратура. В радіоелектронних галузях находять застосування вакуумні конденсатори, оскільки, порівняно з повітряними, вони мають значно більшу питому ємність, менші втрати в широкому частотному діапазоні, більшу стабільність параметрів. Конденсатори змінної ємності мають кращі механічні і малогабаритні показники.
Конденсатори з неорганічним діелектриком розділяють на три групи:
1. низьковольтні;
2. високовольтні;
3. перешкодоподавляючі.
В якості діелектрика в них використовують кераміку, скло, склоемаль, склокераміку і слюду. Обкладки виготовляють у вигляді тонкого шару металу, що наносять на діелектрик або шляхом безпосередньої його металізації, або в вигляді тонкої фольги.
1. конденсатори, призначені для використання в резонансних контурах або інших радіосхемах з малими втратами і високою стабільністю;
2. призначені для використання в колах фільтрів, а також в колах, де малі втрати і висока стабільність не мають суттєвого значення;
3. керамічні конденсатори низькочастотного призначення.
Слюдяні і склоемалеві відносяться до високочастотних, склокерамічні – до типів 1) і 2), керамічні можуть бути всіх трьох типів.
Конденсатори з органічним діелектриком виготовляють шляхом намотки тонких довгих стрічок конденсаторної бумаги, плівок або їх комбінацій з металізованими або фольговими електродами. За призначенням і використовуваними діелектричними матеріалами низьковольтні конденсатори також поділяються на низькочастотні та високочастотні.
До низькочастотних відносяться конденсатори на
основі полярних і слабополярних органічних плівок (бумажні, металобумажні,
лакоплівкові, полікарбонатні та ін.), тангенс кута діелектричних втрат яких має
різко виражену залежність від частоти. Вони можуть працювати на частотах до ![]() Гц при
зниженні амплітуди змінної складової напруги з робот частоти.
Гц при
зниженні амплітуди змінної складової напруги з робот частоти.
До високочастотних плівкових відносяться
конденсатори на основі неполярних органічних плівок (полістирольних і
фторопластових), які мають малі значення тангенс кута діелектричних втрат, що
не залежать від частоти. Вони допускають роботу на частотах до ![]() Гц. До
цієї групи відносять також конденсатори на основі слабополярної
поліпропіленовоі плівки.
Гц. До
цієї групи відносять також конденсатори на основі слабополярної
поліпропіленовоі плівки.
Конденсатори з оксидним діелектриком (електролітичні) розділяються на: конденсатори загального призначення; неполярні; високочастотні; імпульсні; пульсові; перешкодоподавляючі. В якості діелектрика в них використовується оксидний шар, що створюється електрохімічним шляхом на аноді – металевій обкладці з деяких металів.
Неполярні конденсатори з оксидним діелектриком можуть бути використані в колах постійного і пульсуючого струму без врахування полярності, а також допускати зміну полярності під час експлуатації. Їх виготовляють рідинними, алюмінієвими і танталовими.
В залежності від матеріалу анода, оксидні конденсатори розділяють на: алюмінієві; танталові; ніобієві.
Другою обкладкою конденсатора – катодом – є електроліт, що пропитує паперову або тканинну прокладку в оксидно-електролітичних (рідинних) алюмінієвих і танталових конденсаторах, рідкий або желеподібний електроліт в танталових об’ємно-пористих конденсаторах і напівпровідних (двоокис марганцю) в оксидно-напівпровідникових конденсаторах.
Конденсатори з оксидним діелектриком – низьковольтні з відносно високими втратами, але, на відміну від інших типів низьковольтних конденсаторів, мають незрівнянно більші заряди і більші ємності (до сотень тисяч мікрофарад). Вони використовуються в фільтрах джерел живлення та інших колах низьких частот.
Високочастотні конденсатори (алюмінієві, рідинні і танталові оксидно-напівпровідникові) широко використовуються в джерелах вторинного живлення в якості накопичувальних і фільтруючих елементів і перехідних колах напівпровідникових пристроїв в діапазоні частот до сотень кГц. Звичайно, що по частотним властивостях їх неможливо порівнювати з конденсаторами на неорганічній основі.
Для розширення можливості їх використання в більш широкому діапазоні частот необхідно знижувати повний опір конденсаторів. Це стало можливим при появі нових конструкцій конденсаторів, які дозволили їх експлуатацію на значно більш високих частотах.
Імпульсні конденсатори використовуються в електричних колах з відносно тривалим зарядом і швидким розрядом. Такі конденсатори повинні бути енергомісткими, мати малий повний опір і високу робочу напругу. Цим вимогам найбільш повно відповідають оксидно-електролітичні алюмінієві конденсатори з напругою до 500В.
Пускові конденсатори використовуються для пуску асинхронних двигунів. Пускові конденсатори повинні бути неполярними, мати високу робочу напругу змінного струму. Їх ємності, що широко використовуються – десятки-сотні мікрофарад. Виготовляються такі конденсатори на основі алюмінієвих оксидних плівок з рідинним електролітом.
На рис.1.33 показано зовнішній вигляд конденсаторів

Рис. 1.33 Зовнішній вигляд конденсаторів
1.3.4. Іоністори
Окремий клас конденсаторів складають іоністори. Iонiстори - електрохімічні прилади, призначені для зберігання електричної енергії. Вони характеризуються більшим число циклів заряду/розряду, тривалим терміном служби, великою щільністю енергії, працюють незалежно від положення в просторі. Iонiстори використовуються в персональних комп'ютерах, телефонах, пейджерах, органайзерах, годинниках і аналогічних пристроях як резервне джерело живлення для підтримки пам'яті при заміні елементів живлення. Ще одна область застосування - накопичувачі енергії в автономних системах живлення на сонячних елементах і вітрових двигунах. Останнім часом намітилася тенденція до застосування iонiсторiв разом з акумуляторами в системах зі складним динамічним режимом споживання енергії для короткочасного живлення навантаження більшим струмом.
Iонiстори в закордонній технічній літературі відомі як конденсатори з подвійним електричним шаром ( double-layer capa-citors), суперконденсатори ( super-capacitors) і ультраконденсатори ( ultracapa-citors).
У зв'язку з тим, що товщина подвійного електричного шару (тобто відстань між «обкладками» конденсатора) дуже мала, iонiстори мають більші ємності в порівнянні зі звичайними конденсаторами того ж розміру. Типова ємність iонiстора - кілька фарад, при номінальній напрузі 2-10 вольт.
По енергетичній щільності й швидкості доступу до запасеної енергії вони займають проміжне положення між електролітичними конденсаторами великої ємності й невеликих акумуляторів, що проілюстровано на рис.1.34.

Рис. 1.34 . Діапазон ємностей електролітичних конденсаторів,
iонiсторiв та акумуляторів
Конструктивно iонiстори складається із двох пористих вугільних електродів, занурених в електроліт. Електроди ізольовані один від одного сепаратором і розміщені в герметичному корпусі. Оскільки iонiстори займають проміжне положення між конденсаторами й акумуляторами, то конструкція запозичена як від перших, так і від других. Випускаються прилади в «конденсаторних» циліндричних або акумуляторних корпусах.
До основних параметрів iонiсторiв належать робоча напруга, ємність, послідовний внутрішній опір, струм витоку й довговічність.
Робоча напруга визначається властивостями електроліту. Промисловість випускає одиночні iонiстори з робочою напругою від 2,3 до 8 В.
Ємність залежить від активної поверхні електродів і проникаючої здатності електроліту. Випускаються iонiстори ємністю від 0,01 Ф до 4000 Ф
Внутрішній опір лежить у межах від одиниць мОм до сотень Ом. Iонiстори з малим внутрішнім опором здатні віддавати в навантаження більші струми й застосовуються в джерелах живлення мобільної апаратури разом з акумуляторами. Iонiстори з високим внутрішнім опором використовуються головним чином у різних інтелектуальних приладах для підтримки пам'яті при зміні елементів живлення або відмові джерела.
Слід враховувати особливості застосування іоністорів, до яких відносяться:
1. Чутливість до перевищення напруги. Підвищена напруга приводить до різкого збільшення струму витоку, внутрішнього опору, перегріву приладів, зниженню їхньої ємності й, в остаточному підсумку, руйнуванню.
2. Полярність приладів. При зворотному включенні різко зростає струм витоку, відбувається необоротне зниження ємності, ріст внутрішнього опору й відмова приладу.
3. При паралельному включенні, яке використовується для збільшення ємності й струму конденсатори повинні бути захищені один від одного за допомогою зарядних резисторів і не повинні з'єднуватись паралельно при розряді.
4. Розігрів, зниження ємності і зростання внутрішнього опору у випадку перевищення нормованого значення частоти заряду iонiстора.
5. Чутливість до температури. Зниження робочої температури на 10° удвічі збільшує строк їхньої служби. Рекомендується використовувати при невисоких температурах навколишнього середовища, що дозволить значно збільшити їхню довговічність.
Аерогельнi iонiстори- виготовлені зі спіненого вуглецю (carbon aerogel foam). Матеріал має високу електропровідність, добре контрольованою мікропористістю й великою площею активної поверхні. Ще одна перевага нового матеріалу - мінімальний струм витоку. Одне із самих серйозних переваг аерогельних iонiсторiв - надзвичайно мала величина внутрішнього опору (менш 200 мOм), що дозволяє короткочасно віддавати в навантаження більші струми.
Нові прилади конструктивно схожі з літій-іонними акумуляторами й електролітичними конденсаторами. Iонiстори на основі спіненого вуглецю забезпечують щільність потужності до 4000 Вт/кг, в 10 разів більшу, ніж Li-ion акумулятори. Ємність аерогельних iонiсторiв приблизно в 2000 разів вище, ніж в електролітичних конденсаторів. Однак, таку високу ємність можна отримати при невеликій робочій напрузі порядку 2,7 В.
Область застосування іоністорів та акумуляторів в залежності від щільності енергії показані на рис.1.35.

Рис. 1.35 Порівняльна характеристика іоністорів.
1. Високі швидкості зарядки й розрядки.
2. Малу деградацію параметрів, навіть після сотень тисяч циклів заряду/розряду.
3. Малу вагу.
4. Низьку токсичність матеріалів.
5. Високу ефективність (більше 95 %).
До недоліків іоністорів відносять:
1. Питома енергія менше, ніж в акумуляторних батареях ( 3-5 Вт·г/кг при 30-40 Вт·г/кг у акумуляторних батареях).
2. Напруга залежить від ступеня зарядженості.
3. Можливість вигоряння внутрішніх контактів при короткому замиканні.
4. Малий термін служби (сотні годин) на граничних напругах заряду.
1.3.5. Основні електричні параметри і характеристики конденсаторів
Номінальна
ємність – ємність, значення якої позначено на
конденсаторі або вказано в нормативно-технічній документації і є основою для
відліку допускного відхилення. Визначає заряд конденсатора залежно від напруги
на обкладках (![]() )
)
Ємність плоского конденсатора, що складається із двох паралельних металевих пластин площею S кожна, розташованих на відстані d одна від одної, у системі СІ виражається формулою:
![]() ,
,
де ![]() відносна діелектрична проникність
середовища, що заповнює простір між пластинами.
відносна діелектрична проникність
середовища, що заповнює простір між пластинами.
Для одержання більших ємностей конденсатори
з'єднують паралельно (рис.1.36). Загальна ємність батареї паралельно з'єднаних
конденсаторів дорівнює сумі ємностей всіх конденсаторів, що входять у батарею  .
.

Рис. 1.36 Паралельне з’єднання конденсаторів.
При послідовному з'єднанні конденсаторів
(рис.1.37) заряди всіх конденсаторів однакові. Загальна ємність батареї
послідовно з'єднаних конденсаторів дорівнює  .
.
![]()
Рис. 1.37 Послідовне з’єднання конденсаторів.
Струм, викликаний зміною напруги на конденсаторі визначається за формулою:
![]()
Номінальна напруга – значення напруги, позначене на конденсаторі або в технічній документації, при якій він може працювати в заданих умовах на протязі визначеного терміну експлуатації зі збереженням параметрів в допустимих межах. Номінальна напруга встановлюється з запасом, достатнім для забезпечення електричної міцності діелектрика, виключення можливості його інтенсивного старіння. Електрична міцність діелектрика залежить від виду електричної напруги (постійна, змінна, імпульсна), від температури і вологості навколишнього середовища, від площі обкладинок конденсатора і т.д.
При експлуатації конденсаторів на змінній напрузі або комбінації постійної і змінної необхідно дотримуватись наступних умов: амплітудне значення напруги, що прикладається до конденсатора не повинно перевищувати максимально допустимої напруги, що вказується в документах на доставку, а також напруги, що розраховується, виходячи з допустимої реактивної потужності:
![]()
де Um - амплітуда змінної напруги, В; Ppдоп - допустима реактивна потужність, ВАР; f – частота, Гц; С – ємність, пФ.
За номінальний струм конденсатора приймають найбільший струм, при якому конденсатор може працювати в заданих умовах на протязі гарантованого терміну експлуатації. Номінальний струм як параметр використовується для правильного вибору теплових режимів конденсатора.
Тангенс
кута діелектричних втрат, який часто позначається
як ![]() ,
характеризує втрати енергії в конденсаторі і визначається відношенням активної
потужності до реактивної при синусоїдальній напрузі визначеної частоти:
,
характеризує втрати енергії в конденсаторі і визначається відношенням активної
потужності до реактивної при синусоїдальній напрузі визначеної частоти:

де ![]() кут здвигу фаз між струмом і
напругою.
кут здвигу фаз між струмом і
напругою.
![]() залежить від температури, частоти
і зростає з часом.
залежить від температури, частоти
і зростає з часом.
Опір ізоляції - електричний опір конденсатора постійному струмові визначеної напруги. Вимірювання опору виконується при напругах 10; 100; 500 В. Відповідно для конденсаторів з номінальною напругою до 100 В, 100-500 В, понад 500 В.
Для конденсаторів з ємністю понад 0,33 мкФ
прийнято замість опору ізоляції вимірювати постійну часу заряду ![]() , де
, де ![]() величина
опору ізоляції.
величина
опору ізоляції.
При постійній напрузі, прикладеній до обкладок конденсатора, має місце струм витоку (“ток утечки”), який характеризує якість діелектрика. Вимірюється струм витоку після часу “тренування” ізоляції конденсатора, тобто через 1-5 хвилин після включення під напругу.
Температурний коефіцієнт (ТКЄ) - величина, що використовується для
характеристики конденсаторів з лінійною залежністю ємності при зміні
температури оточуючого середовища на ![]() . По значенню ТКЄ з різними
ізоляційними матеріалами конденсатори розділяються на групи, які приводяться у
вигляді таблиць в відповідній довідковій літературі.
. По значенню ТКЄ з різними
ізоляційними матеріалами конденсатори розділяються на групи, які приводяться у
вигляді таблиць в відповідній довідковій літературі.
Діелектрична
абсорбція конденсаторів. Якщо в схемі мають місце
періодичні процеси зарядки і розрядки конденсаторів, то проявляється явище, яке
полягає в тому, що за короткий інтервал часу конденсатор не удається повністю
зарядити або розрядити. Більш того, якщо заряджений конденсатор закоротити на
невеликий інтервал часу, а потім розімкнути, то через короткий інтервал часу на
конденсаторі появиться залишкова напруга ![]() як частка напруги, до якої
конденсатор був зарядженим
як частка напруги, до якої
конденсатор був зарядженим ![]() .
.
Явище, обумовлене затягуванням процесів
поляризації в діелектрику конденсатора, що приводить до появи напруги на
електродах після короткочасної розрядки конденсатора, називається діелектричною абсорбцією. Напруга, що з’являється
на обкладках конденсатора після його короткочасної розрядки суттєво залежить
від тривалості часу був закороченим і часу, що пройшов після цього. Кількісне
значення абсорбції прийнято характеризувати коефіцієнтом абсорбції:  . Його
величина оцінюється в (%) і кількісне значення коливається від 0,03 до 5,5 %.
. Його
величина оцінюється в (%) і кількісне значення коливається від 0,03 до 5,5 %.
Параметр КА зростає з ростом температури. КА враховується при проектуванні високоточних приладів в яких мають місце процеси зарядки і розрядки конденсаторів.
Під повним опором z
конденсатора ємності С, розуміють опір змінному синусоїдальному струмові
визначеної частоти ![]() , обумовлений наявністю активного
опору R і індуктивності L. Еквівалентна схема конденсатора в
такому випадку зображається в вигляді послідовного з’єднання власної ємності С,
активного опору і індуктивності виводів L.
, обумовлений наявністю активного
опору R і індуктивності L. Еквівалентна схема конденсатора в
такому випадку зображається в вигляді послідовного з’єднання власної ємності С,
активного опору і індуктивності виводів L.

Частота, при якій повний опір конденсатора буде мінімальним і чисто активним, називається резонансною. На частоті, нижчій резонансної, характер опору конденсатора ємнісний; на більш високій – індуктивний. Приблизні значення резонансних частот для груп конденсаторів приведені в табл.1.13.
Таблиця 1.13
|
Група конденсаторів |
Власна індуктивність, нГн |
Резонансна частота, нГц |
|
Керамічні, слюдяні |
0,25 – 15 |
1 – 5000 |
|
Паперові, плівкові в циліндрічних корпусах |
6 – 20 |
1,5 – 15 |
|
Паперові, плівкові в прямокутних корпусах |
10 – 100 |
0,1 – 2,5 |
|
З оксидним діелектриком |
3 – 40 |
0,035 – 12 |
Реактивна потужність - добуток напруги U визначеної частоти f, прикладеної до конденсатора, на силу струму І, що проходить через нього, і на синус кута зсуву фаз між ними визначає величину.
Оскільки здебільшого ![]() , а
, а ![]() , то:
, то:
![]() .
.
Поняття реактивної потужності введено для високочастотних конденсаторів і використовується при встановленні допустимих електричних режимів експлуатації. При цьому в області низьких частот обмеження визначаються допустимою амплітудою напруги змінного струму, а на високих – допустимою реактивною потужністю конденсатора. Тому реактивна потужність характеризує навантажувальну здібність конденсатора при наявності на ньому великих напруг високої частоти.
При помноженні реактивної потужності на
коефіцієнт ![]() отримується активна потужність,
обумовлена наявністю втрат потужності в конденсаторі, що приводить до його
нагрівання.
отримується активна потужність,
обумовлена наявністю втрат потужності в конденсаторі, що приводить до його
нагрівання.
Вносиме затухання і опір зв’язку. Ці величини характеризують здібність перешкодоподавляючих конденсаторів і фільтрів подавляти перешкоди змінного струму заданої частоти.
Вносиме затухання (А) пропорційне логарифму відношення напруг, заміряних на навантаженні електричного поля до (U1) і після (U2) вмикання конденсатора в це коло:
![]() .
.
Опір зв’язку (Rзв) визначається як відношення напруги на виході перешкодоподавляючого конденсатора (Uвих) до його вхідного струму (Iхв):
![]() .
.
Поняття Rзв введено для 3-х і 4-х вивідних конденсаторів .
1.3.6. Експлуатаційні фактори та їх вплив на вибір і роботу конденсаторів
Експлуатаційна надійність конденсаторів в електронній апаратурі визначається впливом комплексу факторів, які за своїй природою можна розділити на наступні групи:
· електричні навантаження (напруга та її характер, струм, реактивна потужність, частота змінного струму);
· кліматичні навантаження (температура, вологість, атмосферний тиск, біологічні фактори);
· механічні навантаження (вібрація, удари, акустичні шуми, постійно діюче прискорення);
·
вплив радіації (потік нейтронів, ![]() -
випромінювання, сонячна радіація).
-
випромінювання, сонячна радіація).
Під впливом вказаних факторів і їх інтенсивності в конденсаторах проходять зворотні і незворотні процеси, що приводять до зміни їх параметрів.
Суттєвий вплив на зміну параметрів має
температура. На рис.1.38 показаний характер відносної зміни величини ємності
танталового конденсатора від його температури (крива 1 – для конденсатора 470 мкФ, 6,3 В; крива 2 - 100 мкФ, 16 В; крива 3 -
68 мкФ; 6,3 В). На рис.1.39 наведена залежнітть величини ![]() від температури
для тих же конденсаторів.
від температури
для тих же конденсаторів.
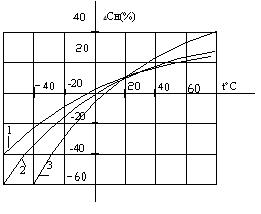
Рис. 1.38 Вплив температури на зміну ємності

Рис. 1.39 Вплив температури на tgδ
Найбільший незворотній вилив на технічні характеристики конденсаторів обумовлений тривалою дією електричного навантаження, при якому мають місце інтенсивні процеси старіння.
Перенапруги і неправильний вибір типу конденсатора для заданих електричних умов експлуатації є домінуючими факторами, які приводять до виходу конденсаторів з ладу.
При виборі конденсаторів для роботи в колах змінного або пульсуючого струму необхідно враховувати їх частотні властивості.
Працездатність конденсаторів при дії змінної напруги обмежується наступними факторами:
· тепловиділення, пропорційне середній потужності, яке може різко зростати при перевищенні допустимих режимів експлуатації і створювати умови для теплового пробою конденсаторів;
· напруженість електричного поля, яка призводить до старіння діелектрика;
· струм, перевищення номінальної величини якого призводить до появи ділянок локального перегріву.
На рис.1.40 приводяться приблизні діапазони робочих частот для різних типів конденсаторів.

Рис. 1.40 Граничні робочі частоти для різних типів конденсаторів
В зв’язку з тим, що з ростом частоти ростуть втрати енергії в конденсаторі, для збереження теплового балансу в конденсаторі і виключення можливості появи пробою з підвищенням частоти необхідно знижувати амплітуду змінної складової. Характерна залежність допустимої амплітуди змінної складової напруги на конденсаторі від частоти приводиться на рис.1.41.
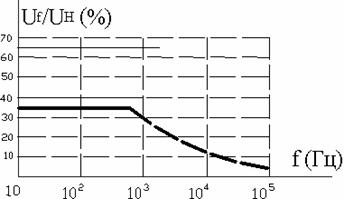
Рис. 1.41 Залежність допустимої напруги на конденсаторі від робочої частоти
В ряді конденсаторів з ростом частоти знижується в значній мірі величина ємності. Це явище обумовлено як зниженням діелектричної проникності діелектрика, так і ростом еквівалентного послідовного опору (RЕ). Вплив еквівалентного опору на значення ефективної ємності визначається формулою:
![]() ;
; ![]() .
.
Для більшості конденсаторів величина RЕ досить мала (долі Ома), і її вплив на ємність конденсатора проявляться лише на високих частотах. Але ряд конденсаторів (конденсатори з рідинним електролітом) має заміну параметрів вже починаючи з сотень герц.
1.3.7. Позначення конденсаторів на схемах
Умовні графічні позначення конденсаторів на схемах повинні відповідати ГОСТ 2.728-74 (дійсний на території України) або міжнародному стандарту IEEE 315-1975.
|
|
загальне позначення конденсаторів (всі конденсатори на схемах мають розміри 8 х 1,5 мм) |
|
|
позначення конденсатора змінної ємності. Якщо змінний конденсатор здвоєний, то стрілочки з’єднуються пунктиром. |
|
|
підстроювальний конденсатор |
|
|
електролітичний (полярний) |
|
|
неполярний конденсатор (електроліт великої ємності, у якого немає полярності підключення. Відрізняється від звичайного за ємністю та номінальною напругою) |
|
|
завадоподавляючий конденсатор |
|
|
прохідний конденсатор (дуга означає корпус, зовнішній електрод) |
|
|
варикап |
На електричних
принципових схемах номінальна ємність конденсаторів зазвичай вказується в
мікрофарадах або пікофарадах (1 мкФ = ![]() пФ). При ємності не більше
0,01мкФ, ємність конденсатора вказують у пікофарадах, при цьому припустимо не
вказувати одиницю виміру, тобто постфікс «пФ» опускають. При позначенні
номіналу ємності в інших одиницях указують одиницю виміру (постфікс). Для
електролітичних конденсаторів, а також для високовольтних конденсаторів на
схемах, після позначення номіналу ємності, указують їх максимальну робочу
напругу у вольтах (В) або кіловольтах (кВ). Для змінних конденсаторів указують
діапазон зміни ємності, наприклад так: «10 - 180».
пФ). При ємності не більше
0,01мкФ, ємність конденсатора вказують у пікофарадах, при цьому припустимо не
вказувати одиницю виміру, тобто постфікс «пФ» опускають. При позначенні
номіналу ємності в інших одиницях указують одиницю виміру (постфікс). Для
електролітичних конденсаторів, а також для високовольтних конденсаторів на
схемах, після позначення номіналу ємності, указують їх максимальну робочу
напругу у вольтах (В) або кіловольтах (кВ). Для змінних конденсаторів указують
діапазон зміни ємності, наприклад так: «10 - 180».
1. За якими ознаками класифікуються конденсатори для електронних та радіотехнічних приладів?
2. Що таке прохідні конденсатори та де їх використовують?
3. Які особливості мають конденсатори загального призначення?
4. Де використовуються імпульсні конденсатори?
5. Які конденсатори називають іоністорами? Які їхні особливості застосування?
6. Що таке тангенс кута діелектричних втрат?
7. В чому полягає явище діелектричної абсорбції?
8. На якій частоті повний опір конденсатора буде мінімальним?
9. Як визначаються вносиме затухання та опір зв’язку?
10. Які фактори впливають на надійність конденсаторів?
11. Чому з підвищенням частоти необхідно знижувати амплітуду змінної складової?
12. У яких випадках зазвичай не вказують одиницю вимірювання ємності на принципових схемах?
1.4. Трансформатори
1.4.1. Загальні відомості і класифікація трансформаторів
Трансформатор – статичний електромагнітний пристрій, що перетворює змінний струм однієї напруги в змінний струм другої напруги дія якого, основана на принципі електромагнітної індукції.
Трансформатор називається силовим, якщо він застосовується для перетворення електричної енергії в електричних мережах і установках, призначених для прийому і використання електричної енергії. До силових відносяться трансформатори:
· трифазні і багатофазні потужністю 6,3 кВт і більше;
· однофазні потужністю 5 кВт і більше.
При менших потужностях трансформатори називаються трансформаторами малої потужності.
Розрізняють силові трансформатори загального призначення, призначені для включення в мережу. Силові трансформатори спеціального призначення призначаються для безпосереднього живлення мереж або приймачів електричної енергії, якщо ці мережі або приймачі відрізняються особливими умовами роботи, характером навантаження або режимом роботи
Класифікація трансформаторів за призначенням.
1. Силові – використовуються для передачі і розподілу електричної енергії.
2. Трансформатори живлення - малопотужні трансформатори, призначені для живлення електричної апаратури і побутових пристроїв.
3. Вимірювальні трансформатори, що працюють в комплексі з вимірювальними приладами і розширюють їх межі вимірювання. До них відносяться:
1. трансформатори струму;
2. трансформатори напруги.
3. імпульсні трансформатори, що працюють в імпульсному режимі.
4. пік-трансформатори – формують пікоподібну напругу.
5. випробувальні трансформатори, які призначені для випробування електричної міцності ізоляції.
Класифікація трансформаторів за числом фаз.
1. Однофазні трансформатори.
2. Трифазні трансформатори.
Трансформатори з числом фаз більше трьох зустрічаються тільки в деяких спеціальних схемах.
Класифікація трансформаторів за числом обмоток.
1. Двохобмоточний трансформатор.
2. Багатообмоточний трансформатор.
3. Однообмоточний трансформатор (автотрансформатор).
Класифікація трансформаторів за системою охолодження.
1. Природне повітряне охолодження. Обмотки, магнітопровід і інші частини трансформатора мають безпосереднє зіткнення з навколишнім повітрям, тому їх охолодження відбувається шляхом випромінювання і природної конвекції повітря.
2. Природне масляне охолодження. Активна частина трансформатора поміщається в бак, що заливається трансформаторним маслом. В деяких випадках бак заливається іншим рідким діелектриком.
3. Масляне охолодження з дуттям. Поверхня бака обдувається вентиляторами при наявному маслі всередині. Цей вид охолодження дозволяє збільшити тепловіддачу в 1,5 - 1,6 разу.
4. Масляне охолодження з примусовою циркуляцією масла. Масло з бака відкачується насосом, проганяється через водяний або повітряний теплообмінник і охолоджене повертається в бак.
1.4.2. Конструкція однофазного трансформатора.
Основними частинами однофазного трансформатора (ОТ) зображеного на рис.1.42 є: магнітопровід (1), ізоляційний каркас (2), обмотки (3), міжобмоточна ізоляція(4).
Магнітопровід виконується з феромагнітного матеріалу і призначений для локалізації магнітного потоку і посилення електромагнітного зв'язку обмоток. Магнітопровід виготовляється з магнітом'яких матеріалів (листової або стрічкової електротехнічної сталі; листового або стрічкового пермалоя, монолітного фериту) з вузькою петлею гістерезису. Чим вужче петля гістерезису, тим менше витрати енергії на перемагнічування, або втрати на «гістерезис».

Рис. 1.42 Конструкція трансформатора.
Магнітопровід збирається з окремих пластин, ізольованих одна від одної або навивається із стрічки. Оскільки при проведенні магнітного потоку в поперечній до нього площині виникають струми Фуко (вихрові струми), то ізоляційні проміжки між листами або шарами стрічки зменшують вихрові струми і, відповідно, втрати потужності в магнітопроводі.
Залежно від конфігурації магнітопроводу, трансформатори бувають:
1. Стрижневого типу.
2. Броньового типу.
3. Кільцевого типу.
Обмотка (3) – складається з витків електричного провідника і створює електричне коло, яке забезпечує створення магніторушійної сили (МРС) витків. Виток обмотки (3), що одноразово охоплює магнітопровід, виконується з електропровідних і ізоляційних матеріалів. При протіканні струму по обмотці, виникають електричні втрати на активному опорі. Для зменшення електричних втрат використовують високопровідний матеріал (мідь, алюміній, срібло). Обмотки трансформатора як правило зосереджені, тому магнітна вісь кожного витка співпадає з результуючою магнітною віссю обмотки.
За розташуванням обмоток розрізняють наступні види трансформаторів:
1. Трансформатори з концентричними обмотками.
2. Трансформатори з обмотками, що чергуються.
1.4.3. Принцип дії однофазного трансформатора.
Електромагнітна система однофазного
двохобмоточного трансформатора (рис.1.43) складається з двох обмоток (1 і 2),
розташованих на магнітопроводі (3). Первинна обмотка (1) з числом витків ![]() включена
в однофазну мережу змінного струму з напругою
включена
в однофазну мережу змінного струму з напругою ![]() , а вторинна обмотка ( 2
) з числом витків
, а вторинна обмотка ( 2
) з числом витків ![]() замкнута на опір навантаження
замкнута на опір навантаження ![]() .
.
Під дією прикладеної напруги ![]() в
первинній обмотці протікає струм
в
первинній обмотці протікає струм ![]() , створюючи МРС первинної обмотки
, створюючи МРС первинної обмотки ![]() , яка
приводить до появи в осерді змінного повного магнітного потоку
, яка
приводить до появи в осерді змінного повного магнітного потоку ![]() , який
складається з основного потоку Ф і потоків розсіювання первинної
, який
складається з основного потоку Ф і потоків розсіювання первинної ![]() та
вторинної
та
вторинної ![]() обмоток.
обмоток.

Рис. 1.43 Електромагнітна система однофазного трансформатора.
Основний потік Ф замикається по
магнітопроводу (3), зчіплюється з обома обмотками і наводить в них МРС ![]() і
і ![]() .
Невелика частина потоку, звана потоком розсіювання
.
Невелика частина потоку, звана потоком розсіювання ![]() первинної обмотки,
замикається по повітрю безпосередньо навколо цієї обмотки.
первинної обмотки,
замикається по повітрю безпосередньо навколо цієї обмотки.
У вторинній обмотці МРС ![]() викликає
струм
викликає
струм ![]() , на опорі навантаження
, на опорі навантаження ![]() знімається
вихідна напруга
знімається
вихідна напруга ![]() і вихідна потужність
і вихідна потужність ![]() .
Одночасно струм
.
Одночасно струм ![]() створює МРС вторинної обмотки
створює МРС вторинної обмотки ![]() ,
напрям якої в контурі магнітопроводу визначається за правилом
Ленца. Значення потоку Ф, що замикається по осердю,
визначається результуючою дією МРС
,
напрям якої в контурі магнітопроводу визначається за правилом
Ленца. Значення потоку Ф, що замикається по осердю,
визначається результуючою дією МРС ![]() і
і ![]() .
.
У обох обмотках ЕРС взаємоіндукції визначаються відповідно до закону електромагнітної індукції:
![]()
1.4.4. Характеристики трансформатора.
1.
Зовнішня характеристика
однофазного трансформатора (рис.1.44) це залежність напруги ![]() від струму
навантаження, який дорівнює струму у вторинній обмотці
від струму
навантаження, який дорівнює струму у вторинній обмотці ![]() , тобто
, тобто ![]() (при
(при ![]() ). Коефіцієнт навантаження
). Коефіцієнт навантаження ![]() , де
, де ![]() номінальний
вторинний струм.
номінальний
вторинний струм.

Рис. 1.44 Зовнішня характеристика однофазного трансформатора
Пряма 1 на рис.1.44 відповідає зміні напруги
на вторинній обмотці ![]() при активно–ємнісному характері
навантаження і вказує, що при збільшенні вихідного струму
при активно–ємнісному характері
навантаження і вказує, що при збільшенні вихідного струму ![]() , напруга на
виході
, напруга на
виході ![]() однофазного трансформатора
зростає. При активно–індуктивному характері навантаження (пряма 2), при підвищенні
струму
однофазного трансформатора
зростає. При активно–індуктивному характері навантаження (пряма 2), при підвищенні
струму ![]() , напруга
, напруга ![]() спадає.
спадає.
2. Коефіцієнт корисної дії - є основною енергетичною характеристикою трансформатора. ККД дорівнює відношенню активної потужності, що передається в навантаження, до потужності, що споживається:
![]() ,
,
де ![]() активна потужність, що
споживається з мережі;
активна потужність, що
споживається з мережі; ![]() зсув по фазі між
зсув по фазі між ![]() і
і ![]() ;
; ![]() активна
потужність, що споживається навантаженням;
активна
потужність, що споживається навантаженням; ![]() зсув по фазі між
зсув по фазі між ![]() і
і ![]() .
.
З графіка залежності ККД від значення і
характеру навантаження (рис.1.45) видно, що ККД рівний нулю при холостому ході
(х.х.) (![]() ) та при короткому замиканні
(к.з.) (
) та при короткому замиканні
(к.з.) (![]() ) і досягає максимуму при деякому
опорі навантаження
) і досягає максимуму при деякому
опорі навантаження ![]() , який відповідає струму
, який відповідає струму ![]() .
.
Рис. 1.45 Характеристика ККД однофазного трансформатора
1.4.5. Робота трансформатора в режимі холостого ходу
Під холостим ходом трансформатора розуміється режим його роботи при розімкненій вторинній обмотці.
Первинна обмотка трансформатора підключена до джерела змінної напруги, а опір
навантаження ![]() (рис.1.43). Електрорушійні сили
(рис.1.43). Електрорушійні сили ![]() і
і ![]() , що
індукуються в обмотках трансформатора основним магнітним потоком, називаються трансформаторними ЕРС.
, що
індукуються в обмотках трансформатора основним магнітним потоком, називаються трансформаторними ЕРС.
Основний магнітний потік змінюється по синусоїдальному закону
![]() ,
,
де ![]() максимальне або амплітудне
значення основного магнітного потоку;
максимальне або амплітудне
значення основного магнітного потоку; ![]() кутова частота;
кутова частота; ![]() частота
змінної напруги.
частота
змінної напруги.
Миттєве значення ЕРС
![]() .
.
Максимальне значення ЕРС
![]() .
.
Діюче значення ЕРС в первинній обмотці
![]() .
.
Для вторинної обмотки
![]() .
.
Магнітний потік розсіяння індукує в первинній обмотці ЕРС розсіяння
![]() ,
,
де ![]() індуктивність розсіяння
первинної обмотки.
індуктивність розсіяння
первинної обмотки.
Рівняння за другим законом Кірхгофа для первинної обмотки:
![]() ,
,
звідки
![]() . (1.5)
. (1.5)
Напруга на первинній котушці має три доданки: напруга, що врівноважує трансформаторну ЕРС, напруга, що врівноважує ЕРС розсіяння, падіння напруги на активному опорі.
Запишемо рівняння (1.5) в комплексній формі
![]() ,
(1.6)
,
(1.6)
де ![]() індуктивний опір розсіяння
первинної обмотки.
індуктивний опір розсіяння
первинної обмотки.
На рис.1.46 зображена векторна діаграма трансформатора, що працює в режимі холостого ходу.
Рис. 1.46 Векторна діаграма трансформатора, що працює в режимі холостого ходу.
Вектори трансформаторних ЕРС ![]() і
і ![]() відстають
на 90° від вектора основного магнітного потоку
відстають
на 90° від вектора основного магнітного потоку ![]() . Вектор напруги
. Вектор напруги ![]() паралельний
вектору струму
паралельний
вектору струму ![]() , а вектор
, а вектор ![]() випереджає
вектор струму
випереджає
вектор струму ![]() на 90°. Вектор напруги
на 90°. Вектор напруги ![]() на
затисках первинної обмотки трансформатора дорівнює геометричній сумі векторів
на
затисках первинної обмотки трансформатора дорівнює геометричній сумі векторів ![]() ,
, ![]() ,
, ![]() .
.
На рис.1.47 зображена схема заміщення трансформатора,
що відповідає рівнянню (1.6). ![]() індуктивний опір, пропорційний
реактивній потужності, що витрачається на створення основного магнітного потоку
індуктивний опір, пропорційний
реактивній потужності, що витрачається на створення основного магнітного потоку
![]() .
.
Рис. 1.47 Схема заміщення трансформатора, що відповідає рівнянню (1.6).
У режимі холостого ходу ![]() ;
; ![]() .
.
Коефіцієнт трансформації  .
.
1.4.6. Робота трансформатора з навантаженням
Якщо до первинної обмотки трансформатора
підключити напругу ![]() , а вторинну обмотку з'єднати з
навантаженням, в обмотках з'являться струми
, а вторинну обмотку з'єднати з
навантаженням, в обмотках з'являться струми ![]() і
і ![]() . Ці струми
створять магнітні потоки
. Ці струми
створять магнітні потоки ![]() і
і ![]() , направлені назустріч
один одному. Сумарний магнітний потік в магнітопроводі зменшується. Внаслідок
цього індуковані сумарним потоком ЕРС
, направлені назустріч
один одному. Сумарний магнітний потік в магнітопроводі зменшується. Внаслідок
цього індуковані сумарним потоком ЕРС ![]() і
і ![]() зменшуються. Значення
напруги
зменшуються. Значення
напруги ![]() , що діє, залишається незмінним.
Зменшення
, що діє, залишається незмінним.
Зменшення ![]() , згідно (1.6), викликає
збільшення струму
, згідно (1.6), викликає
збільшення струму ![]() . При збільшенні струму
. При збільшенні струму ![]() потік
потік
![]() збільшується
рівно настільки, щоб компенсувати розмагнічуючу дію потоку
збільшується
рівно настільки, щоб компенсувати розмагнічуючу дію потоку ![]() . Знов
відновлюється рівновага при практично попередньому значенні сумарного потоку.
. Знов
відновлюється рівновага при практично попередньому значенні сумарного потоку.
Потоки ![]() і
і ![]() індукують в первинній і
вторинній обмотках ЕPС розсіяння:
індукують в первинній і
вторинній обмотках ЕPС розсіяння:
![]() ,
,
де ![]() індуктивний опір розсіяння
вторинної обмотки. Для первинної обмотки рівняння напруги має вигляд рівняння
(1.6). Для вторинної обмотки
індуктивний опір розсіяння
вторинної обмотки. Для первинної обмотки рівняння напруги має вигляд рівняння
(1.6). Для вторинної обмотки
![]() , (1.7)
, (1.7)
де ![]() активний опір вторинної обмотки.
активний опір вторинної обмотки.
Трансформаторна ЕРС ![]() , пропорційна
основному магнітному потоку, приблизно дорівнює напрузі на первинній котушці
, пропорційна
основному магнітному потоку, приблизно дорівнює напрузі на первинній котушці ![]() . При постійному
значення напруги на первинній котушці
. При постійному
значення напруги на первинній котушці ![]() основний магнітний потік
трансформатора залишається незмінним при зміні опору навантаження від нуля до
безкінечності. Якщо
основний магнітний потік
трансформатора залишається незмінним при зміні опору навантаження від нуля до
безкінечності. Якщо ![]() , то і сума магніторушійних сил
трансформатора
, то і сума магніторушійних сил
трансформатора
![]() . (1.8)
. (1.8)
Рівняння (1.8) називається рівнянням рівноваги магніторушійних сил, а рівняння (1.6)-(1.8) називаються основними рівняннями трансформатора.
З рівняння (1.8) можна отримати формулу
 , (1.9)
, (1.9)
з якої видно, що струм в первинній обмотці складається із струму холостого ходу, або струму, що намагнічує, і струму, який компенсує розмагнічуючу дію вторинної обмотки.
Помножимо ліву і праву частини рівняння (1.7)
на коефіцієнт трансформації ![]()
 (1.10)
(1.10)
де ![]() приведений активний опір
вторинної обмотки;
приведений активний опір
вторинної обмотки; ![]() приведений індуктивний опір
вторинної обмотки;
приведений індуктивний опір
вторинної обмотки; ![]() приведена напруга на
навантаженні;
приведена напруга на
навантаженні; ![]() приведений опір навантаження.
Величиною струму намагнічування
приведений опір навантаження.
Величиною струму намагнічування ![]() можна знехтувати
можна знехтувати ![]() ,
оскільки він малий в порівнянні із струмом первинної обмотки трансформатора в
режимі навантаження , тоді
,
оскільки він малий в порівнянні із струмом первинної обмотки трансформатора в
режимі навантаження , тоді ![]() .
.
Підставимо рівняння (1.10) в рівняння (1.6), та отримаємо:
 (1.11)
(1.11)
Рівнянню (1.11) відповідає спрощена схема заміщення трансформатора, яка зображена на рис.1.48.
Рис. 1.48 Спрощена схема заміщення трансформатора
Для цієї схеми ![]() активний опір короткого
замикання трансформатора;
активний опір короткого
замикання трансформатора; ![]() індуктивний опір короткого
замикання.
індуктивний опір короткого
замикання.
Параметри спрощеної схеми заміщення можуть бути визначені з досліду короткого замикання. Для цього збирається схема, що наведена на рис.1.49.
Рис. 1.49 Схема для досліду короткого замикання
Затиски вторинної обмотки замикаються
накоротко. Дослід короткого замикання здійснюється при пониженій напрузі на
первинній обмотці за умови, що струм у вторинній обмотці дорівнює номінальному
значенню ![]() . Вимірюють напругу, струм і
потужність:
. Вимірюють напругу, струм і
потужність: ![]() . Потім обчислюють
. Потім обчислюють
![]() ,
, ![]() ,
, ![]() .
.
де ![]() повний опір короткого замикання.
повний опір короткого замикання.
1.4.7. Трифазні трансформатори
Трифазні трансформатори, потужністю в одиниці і десятки кВ·А, зазвичай виконують з єдиною магнітною системою фаз. В цьому випадку конструкція магнітної системи нагадує конструкцію магнітної системи однофазного броньового трансформатора з тією лише різницею, що тут поперечний переріз всіх трьох стрижнів однаковий (рис. 1.50, а).
Рис. 1.50 Трифазні трансформатори
Великими буквами A, B, C позначаються виводи обмоток вхідної напруги, малими а, b, c - виводи обмоток вихідної напруги. Основні схеми з'єднання обмоток фаз - зірка і трикутник. При схемі з'єднання зірка (Y) (рис.1.50, б) кінці обмоток X, Y, Z з'єднуються в загальну нульову точку, початки обмоток A, B i C під'єднують до зовнішнього кола. При схемі з'єднання трикутник (Δ) (рис. 1.50, в) по черзі з'єднують початки і кінці обмоток фаз. За держстандартом рекомендують наступні схеми з'єднання обмоток: Y/Y0, Y/Δ і Y0/Δ ; для трансформаторів малої потужності допускаються також схеми Δ/Δ, Δ/Y і Δ/Y0. Схема Y0 означає з'єднання зіркою з виведеною нульовою точкою.
У трифазних трансформаторів разом з схемою з'єднання обмоток, що рекомендується, вказується номер групи (від 0 до 12) трансформатора, відповідний даній схемі. Група характеризує зсув по фазі між первинною і вторинною лінійною напругою трансформатора. Для паралельної роботи повинні підключатися трансформатори, що мають однакову вихідну напругу і належать до однієї групи, для того щоб не виникали зрівняльні струми із-за різниці фаз вихідної напруги.
Трифазні трансформатори широко використовуються як трансформатори для статичних перетворювачів, що використовуються для живлення електроприводів.
1.4.8. Імпульсні трансформатори
Імпульсні трансформатори застосовують в радіоелектроніці для перетворення короткочасних сигналів з крутими фронтами, в основному прямокутних імпульсів тривалістю до долі мікросекунди. Основна вимога, що пред'являється до імпульсних трансформаторів, полягає в мінімальному спотворенні форми імпульсів і зниження тривалості їх фронтів. Спотворення пояснюється нелінійністю кривої намагнічування матеріалу магнітопроводу, наявністю потоків розсіяння обмотки, що збільшується, в міру зростання частоти імпульсів, в наслідок впливу вихрових струмів в магнітопроводі і паразитних міжвиткових і міжобмоточних ємностей. Зокрема, електромагнітна постійна часу трансформатора, така, що визначає тривалість фронтів імпульсу, тим більше, чим більша індуктивність розсіювання, паразитна ємність обмоток і вихрові струми. Зменшення розсіювання в імпульсних трансформаторах досягається використанням кільцевих магнітопроводів, зменшення вихрових струмів - використанням магнітопроводів з фериту або тонкої пермалоєвої стрічки, зменшення ємності - спеціальною схемою укладання проводів і металевими екранами. Лінійність намагнічування забезпечується вибором відповідного матеріалу магнітопроводу і малими значеннями індукції.
Слід мати на увазі, що трансформація
прямокутних імпульсів можлива тільки в тому випадку, якщо тривалість імпульсів ![]() значно
менше повної електромагнітної постійної часу первинної обмотки. Це означає, що
струм, що намагнічує, і магнітний потік за час
значно
менше повної електромагнітної постійної часу первинної обмотки. Це означає, що
струм, що намагнічує, і магнітний потік за час ![]() не будуть досягати
сталого значення. Інакше в трансформаторі встановиться постійний потік і
вихідна ЕРС буде дорівнювати нулю.
не будуть досягати
сталого значення. Інакше в трансформаторі встановиться постійний потік і
вихідна ЕРС буде дорівнювати нулю.
1. Дайте класифікацію трансформаторів за призначенням?
2. Дайте класифікацію трансформаторів за числом фаз і обмоток?
3. Які системи охолодження існують для трансформаторів?
4. Опишіть принцип дії однофазного трансформатора.
6. Наведіть графік та поясніть характеристику ККД однофазного трансформатора.
8. Наведіть схему заміщення навантаженого трансформатора. Запишіть для неї основні рівняння.
9. Дайте класифікацію з’єднання трифазних трансформаторів.
10. Призначення імпульсних трансформаторів.
1.5. Дроселі
1.5.1. Загальні положення
Дроселями називаються статичні електромагнітні пристрої, використовувані в електричних ланцюгах як індуктивні опори, які широко застосовують в радіоелектронній, радіотехнічній і електротехнічній апаратурі. Розрізняють декілька різновидів дроселів:
1. дроселі змінного струму;
2. згладжувальні дроселі;
3. дроселі насичення.
Окрім того, дроселі розділяють:
· по вигляду вольт-амперної характеристики - на лінійні (ненасичені) і нелінійні (насичені);
· по можливості зміни величини індуктивності - на регульовані і нерегульовані;
· по вигляду регулювання - на дроселі, регульовані шляхом зміни величини повітряного зазору або шляхом зміни струму підмагнічування;
· за призначенням - на баластні, струмообмежувальні (реактори) і регулюючі.
На відміну від трансформаторів, що включаються, як правило, паралельно джерелам живлячої напруги, дроселі зазвичай включаються послідовно з іншими елементами електричних кіл.
Загальною ознакою для всіх типів дроселів є те, що всі вони є котушками з феромагнітним осердям або магнітопровідом. Дроселі змінного струму мають одну обмотку. Згладжувальний дросель, також має одну обмотку, але в ньому тече пульсуючий випрямлений струм. Дросель насичення має дві обмотки, в одній з яких тече змінний, а другій - постійний струм.
Особливе місце займають дроселі високої частоти, які мають велику індуктивність при мінімально можливій власній ємності. Для забезпечення у високочастотному дроселі необхідного співвідношення між індуктивністю і власною ємністю використовують осердя з фериту, каркаси і обмотувальні проводи можливо малих діаметрів. Використовують також й спеціальні типи обмоток. Наприклад, одношарову обмотку спочатку намотують щільно - виток до витка, а потім переходять до намотування з кроком, що поступово збільшується. При багатошаровому намотуванні для тієї ж мети частину секцій роблять з меншим числом витків.
1.5.2. Конструкція дроселів
Дросель любого типу складається з котушки – 1 (рис.1.51), яка намотана ізольованим проводом або фольгою, осердя з феромагнітного матеріалу або магнітопроводу – 2 (рис.1.51). Як правило, в магнітопроводі дроселя є поперечні зазори – прокладки з немагнітного металу.
Характерним для броньових дроселів є наявність лише однієї обмотки (рис. 1.51, а, г). Стержньові дроселі (рис.1.51, б) роблять с двома або з однією котушками. В тороїдальних дроселях обмотка розподіляється по всьому периметру осердя (рис.1.51, в).

Рис. 1.51 Типові конструкції однофазних дроселів відкритої конструкції:
а) броньовий з стрічковим магнітопровідом; б) стержньовий з стрічковим осердям і двома котушками; в) тороїдальний; г) броньовий із осердям із штампованих пластин
Кріплення дроселя на шасі пристрою частіше за все виконується з допомогою обжимного магазину – 3 (рис.1.51) який стягує осердя і має форму скоби. Магазин краще за все виготовляти з немагнітного матеріалу. При використанні магнітного матеріалу шунтується зазор, що призводить до зміни індуктивності дроселя. Для зменшення втрат кріплення роблять з пластмаси.
Для забезпечення надійної роботи і захисту від вологи дроселі покривають різними лаками та компаундами. Конструкція осердя дроселів показані на рис. 1.52, їх виготовляють з електротехнічної сталі або із феритів.
Для виготовлення магнітопроводу дроселів радіоелектронної апаратури широко застосовуються електротехнічні текстуровані холоднокатані сталі марок 3411(Е310), 3412(Е320), 3413(Е330), 3414(Е330А) та 3415. Для зменшення в осерді втрат від вихрових струмів їх виконують з тонких листів сталі, але листи не повинні бути через мірно тонкими, тому що з зменшенням товщини збільшуються втрати на гістерезис. Для різних частот оптимальна різна товщина листа, наприклад: при 50 Гц оптимальна товщина 0.2-0.5 мм, а для товщини 400 Гц – товщина 0.1 – 0.2 мм. Для роботи на великих частотах осердя зроблені з листової сталі непридатні, для роботи на великих частотах застосовують феритові осердя. Осердя дроселів виконують набірними пластинами з електротехнічної сталі або з феромагнітної стрічки.
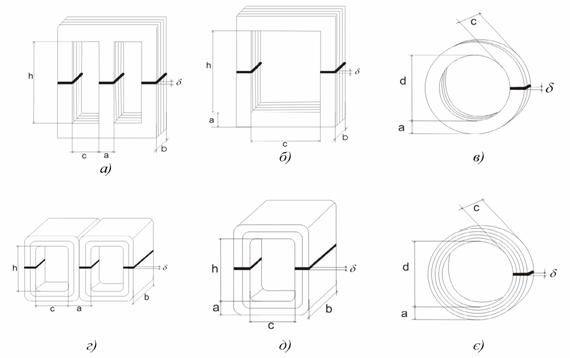
Рис. 1.52 Магнітопроводи дроселів:
1 – штамповані набірні: а) броньовий ; б) стержньовий; в) тороїдальний;
2 – стрічкові : г) броньовий; д) стержньовий; є) тороїдальний;
а – базисний розмір дроселя; b – ширина стрічки; h і c – висота і ширина вікна; δ – довжина немагнітного зазору; d – внутрішній діаметр тороїда.
Обмотки дроселів роблять з круглого мідного проводу з емалевою ізоляцією, також широке застосування знаходить оксидна алюмінієва фольга.
Обмотки броньових і стержньових дроселів представляють із себе прямокутні котушки, які насаджуються на осердя. Розрізняють обмотки:
1. каркасні;
2. безкаркасні.
Каркасні намотують на каркас з боковими щічками на гільзу. Каркас збірний з гетинаксу або з текстоліту, або з пресованої пластмаси. При намотуванні на каркас з щічками ізоляційні прокладки розподіляють рівномірно за товщиною котушки.
Намотування проводу робиться двома способами:
1. безпорядку;
2. рядами, виток до витку з прокладками ізоляції;
Перший спосіб намотування може бути рекомендований в разі виготовлення обмоток з великим числом витків тільки на каркас з боковими щічками. Намотування дроселя рядами з ізолюючими прокладками між рядами проводиться на гільзах. При намотуванні рядами малих проводів виходить малий коефіцієнт заповнення, що вкрай небажано, особливо для маленьких дроселів.
Безкаркасна обмотка виконується на спеціальних станках. Витки скріплюються між собою клеєм. Після сушки котушка інколи обвалькується епоксидною емаллю, що придає їй монолітність і хорошу вологостійкість. Виводи в дроселі відкритого виконання закріплюють частіше всього на щічці каркасу або безпосередньо на обмотці. Один з виводів обмотки повинен маркіруватися крапкою або зірочкою, як вказує на начало обмотки. Це потрібно робити, тому що часто дросель потрібно включати в схему конкретним образом.
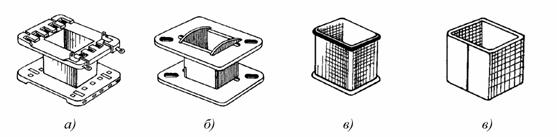
Рис. 1.53 Каркаси для обмоток дроселів:
а) пресований із пластмаси; б) збірний з щічками; в) гільзи;
1.5.3. Дроселі змінного струму
Дроселі змінного струму використовують в якості баластних і струмообмежуючих опорів в ланках змінного струму. Вони також використовуються для отримання різних вольт-амперних характеристик вказаних ланок. Дросель змінного струму складається з замкненого магнітопроводу і обмотки (рис.1.54, а).
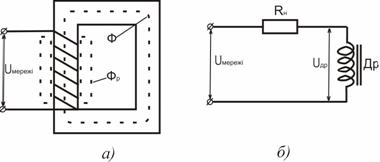
Рис. 1.54 Дросель змінного струму.
а) магнітопровід з обмоткою; б) схема включення
Розглянемо роботу дроселя змінного струму,
включеного в схему послідовно з активним опором. При подачі змінного струму на
вхід схеми (рис.1.54, б) в колі встановлюється струм I ,
обумовлений його сумарним опором. При проходженні струму по обмотці дроселя в
магнітопроводі виникає змінний магнітний потік Ф, який відстає від
струму на кут втрат ![]() .
.
Вектор Ф можна представити в вигляді
суми двох складових – потоку ![]() , який співпадає зі струмом і ЕРС
, який співпадає зі струмом і ЕРС ![]() , та
потоку
, та
потоку ![]() , перпендикулярного струму і ЕРС
, перпендикулярного струму і ЕРС ![]() .
Наявність активного опору обмотки дроселя
.
Наявність активного опору обмотки дроселя ![]() викликає в ній спад активної
напруги
викликає в ній спад активної
напруги ![]() . За законом рівноваги ЕРС
отримаємо:
. За законом рівноваги ЕРС
отримаємо:
![]() (1.12)
(1.12)
Для схеми (рис 1.54, б) на підставі (1.12) і співвідношенні:
![]() (1.13)
(1.13)
може бути побудована векторна діаграма, яка зображена на рис.1.55

Рис. 1.55 Векторна діаграма дроселя змінного струму
Основним параметром дроселя змінного струму є
його індуктивність (L). Як видно з векторної діаграми рис.1.55, ЕРС зсунута по фазі
відносно струму ![]() на кут 90˚ , тобто вона є
реактивною сталою ЕРС, індукованою в одмотці дроселя. Величина ЕРС
на кут 90˚ , тобто вона є
реактивною сталою ЕРС, індукованою в одмотці дроселя. Величина ЕРС ![]() може
бути визначення з виразу:
може
бути визначення з виразу:
![]() , (1.14)
, (1.14)
де ![]() індуктивний опір дроселя;
індуктивний опір дроселя; ![]() його
індуктивність.
його
індуктивність.
Якщо знехтувати величиною ![]() по відношенню
до
по відношенню
до ![]() ,
то
,
то
![]() (1.15)
(1.15)
звідки на основі формули ![]() та виразу (1.15)
та виразу (1.15)
 . (1.16)
. (1.16)
Треба відмітити, що вираз (1.16) вірний лише
при синусоїдальному характері зміни ЕРС і струму. Відношення ![]() не
залишається сталим, а як видно з рис. 1.56, зменшується з збільшенням струму
дроселя.
не
залишається сталим, а як видно з рис. 1.56, зменшується з збільшенням струму
дроселя.

Рис. 1.56 Крива намагнічування для дроселя без зазору
Зі змінною відношення ![]() змінюється і
індуктивність дроселя. Лише при відносно малих значеннях струму, коли
магнітопровід дроселя не знаходиться в насиченому стані, вольт-амперна
характеристика дроселя остається лінійною, а його індуктивність залишається
сталою. При подальшому збільшенні струму індуктивність дроселя падає.
змінюється і
індуктивність дроселя. Лише при відносно малих значеннях струму, коли
магнітопровід дроселя не знаходиться в насиченому стані, вольт-амперна
характеристика дроселя остається лінійною, а його індуктивність залишається
сталою. При подальшому збільшенні струму індуктивність дроселя падає.
По мірі насичення магнітопроводу форма кривої струму дроселя спотворюється. На рис. 1.57 показана форма струму при синусоїдальній напрузі в мережі і роботі дроселя на різних ділянках кривої намагнічення, що відповідають насиченому і ненасиченому стану магнітопроводу.

Рис. 1.57 Форма струму намагнічення
для насиченого і ненасиченого магнітопроводу
Степінь спотворення також залежить від
відношення між величинами індуктивного опору дроселя і активного опору
навантаження, зменшуючись при зменшенні відношення ![]() . Тому приведений вище
вираз для визначення індуктивності дроселя справедливий лише для ненасичених
магнітопроводів або при малих значення величини
. Тому приведений вище
вираз для визначення індуктивності дроселя справедливий лише для ненасичених
магнітопроводів або при малих значення величини ![]() .
.
Величину індуктивності при зміні струму в широких межах можна зберегти практично постійною шляхом ведення в магнітну ланку дроселя немагнітного зазору. При цьому збільшується загальний магнітний опір ланки і величина магнітного потоку зменшується, але залежність між магнітним потоком і струмом становиться більш лінійною. Останнє пояснюється тим, що зазор, який визначає в основному опір магнітопроводу, не насичується і тому загальний опір магнітної ланки при зазорі достатньої величини залишається практично незмінним.
Змінюючи величину зазору можна змінювати величину опору магнітної ланки дроселя, а відповідно і його індуктивність. Тому дросель змінного струму з повітряним зазором, що змінюється можливо використовувати в якості регульованого індуктивного опору.
1.5.4. Згладжувальні дроселі
Згладжувальні дроселі використовують для зменшення пульсацій. Згладжувальний дросель, як і дросель змінного струму, складається з замкненого магнітопроводу і однієї обмотки. Обмотка дроселя включається послідовно з навантаженням і по ній проходить випрямлений струм.
Як відомо, в любій схемі випрямлення струм має пульсуючий характер. Його можна зобразити у вигляді суми сталої складової і ряду змінних складових різних частот, що змінюються за синусоїдальним законом. Амплітуди змінних складових випрямленого струму значно зменшуються із збільшенням їхньої частоти, тому можна приблизно вважати, що випрямлений струм змінюється відповідно до виразу:
![]() , (1.17)
, (1.17)
де ![]() і
і ![]() амплітуда і частота
першої гармоніки.
амплітуда і частота
першої гармоніки.
Розглянемо фізичні процеси в осерді згладжувального дроселя при його намагнічуванні пульсуючим струмом виду (1.17). На рис.1.58 приведенні для порівняння криві зміни магнітного потоку в осерді при намагнічуванні синусоїдальним струмом для двох режимів роботи: при відсутності і при наявності підмагнічування постійним струмом.
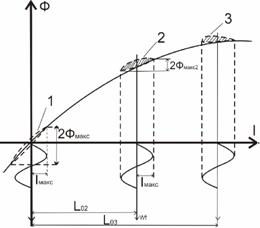
Рис. 1.58 Робота згладжувального дроселя при підмагнічуванні
Відомо, що при циклічному намагнічуванні потік змінюється не по основній кривій намагнічування, а по замкненій петлі, яка носить назву петля гістерезису. Для випадку, коли постійне підмагнічування відсутнє, гістерезисний цикл зображається кривою 1, симетричною відносно кривої первинного намагнічування. При наявності постійного підмагнічування процес намагнічування йде по частинним гістерезисним циклам (криві 2 і 3). Частинні цикли характеризуються збільшеною площею, тобто збільшенням втрат.
Індуктивність згладжувального
дроселя може бути визначена на основі виразу (1.16),
в який потрібно підставляти відношення ![]() при наявності підмагнічування. З
порівняння приватних циклів 1, 2 і 3 (рис.1.58) видно, що величина відношення,
а відповідно і індуктивність дроселя зменшуються із збільшенням струму
підмагнічування. Приблизний вигляд залежності
при наявності підмагнічування. З
порівняння приватних циклів 1, 2 і 3 (рис.1.58) видно, що величина відношення,
а відповідно і індуктивність дроселя зменшуються із збільшенням струму
підмагнічування. Приблизний вигляд залежності ![]() зображено на рис.1.59.
зображено на рис.1.59.

Рис. 1.59 Залежність індуктивності дроселя від струму підмагнічування
Фізично зменшення індуктивності із збільшенням струму підмагнічування зв’язано з тим, що по мірі збільшення цього струму магнітопровід все більше і більше насичується.
Ведення в магнітну ланку дроселя повітряного зазору дозволяє зменшити спад індуктивності із збільшенням струму підмагнічування. При наявності зазору характеристика намагнічування стає більш лінійною, а його магнітопровід насичується при відносно більших значення струму ніж магнітопроводи дроселів, що не мають зазору.
Введення зазору в згладжувальні дроселі знижує вплив постійної складової на індукцію, від чого збільшується проникність матеріалу осердя відносно змінної складової і зменшується його магнітний опір. При оптимальному зазорі індуктивність має максимальну величину для даного режиму роботи.
Дійсно, при наявності зазору змінна ЕРС обмотки дроселя витрачається на подолання магнітних опорів осердя і зазору, тобто:
![]() , (1.18)
, (1.18)
де ![]() довжина шляху магнітного потоку в
осерді;
довжина шляху магнітного потоку в
осерді; ![]() довжина шляху магнітного потоку в
зазорі;
довжина шляху магнітного потоку в
зазорі; ![]() амплітуда змінної складової
напруженості магнітного поля.
амплітуда змінної складової
напруженості магнітного поля.
З (1.18) маємо:
 ,
(1.19)
,
(1.19)
де ![]() динамічна
магнітна проникність матеріалу осердя.
динамічна
магнітна проникність матеріалу осердя.
Підставляючи (1.8) в (1.5) і враховуючи, що ![]() ,
отримаємо:
,
отримаємо:
 . (1.20)
. (1.20)З цього рівняння видно, що
величина індуктивності дроселя при заданих геометричних розмірах осердя і
заданій кількості витків залежить від величини магнітної проникності ![]() і довжини зазору
і довжини зазору ![]() .
.
Максимальне значення індуктивності при наявності оптимального повітряного зазору дорівнює:
 , (1.21)
, (1.21)
де  ефективна
магнітна проникність при наявності немагнітного зазору.
ефективна
магнітна проникність при наявності немагнітного зазору.
1.5.5. Дроселі насичення
Дроселі насичення використовують в якості регульованих індуктивних опорів в ланках змінного струму. На відміну від двох вище розглянутих типів дроселів, що мають тільки одну обмотку, дросель насичення має не менше двох обмоток (рис.1.60).
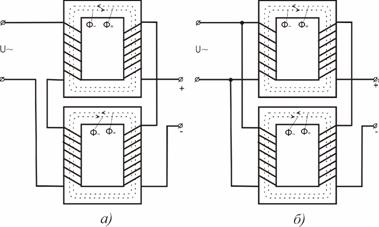
Рис. 1.60 Схеми дроселя насичення на двох стержньових осердях:
а) послідовно з’єднанні; б) паралельно з’єднанні
Одна обмотка включена в ланку змінного струму, а друга в ланку постійного струму. Повітряні зазори, які так корисні в згладжувальних дроселях, в дроселях насичення відсутні.
При аналізі фізичних процесів в згладжувальних дроселях було показано, що при відсутності повітряних зазорів спостерігається значна зміна індуктивності при зміні струму підмагнічування (рис.1.59). Ця властивість і лежить в основі роботи дроселя насичення. Основною відмінністю дроселів насичення по відношенню до згладжувальних дроселів є значно більша величина змінної складової магнітного потоку в осерді і синусоїдальний характер зміни цього потоку. Через нелінійний характер кривої намагнічування форма кривої змінної складової напруженості магнітного поля, а відповідно і форма струму в робочих обмотках дроселя насичення спотворюються. Це особливо помітно при великих значеннях магнітної індукції, близьких до індукції насичення осердя.
1. Назвіть різновиди дроселів.
2. Якою повинна бути товщина пластин (стрічки) осердя дроселя для роботи на частоті 50 Гц? 400 Гц?
4. З якою метою в осердя дроселя вводять немагнітний (повітряний) зазор?
5. Для яких цілей використовують згладжувальні дроселі?
6. Як залежить індуктивність дроселя від струму підмагнічування?
7. Що таке оптимальний немагнітний зазор?
8. Наведіть формулу для визначення індуктивності дроселя через параметри осердя.
9. Що є основною відмінністю дроселя насичення по відношенню до згладжувального дроселя?
РОЗДІЛ 2. ПРИНЦИПИ ПОБУДОВИ СИСТЕМ УПРАВЛІННЯ
2.1. Основні положення
Пристрої перетворення параметрів електричної енергії являють собою замкнені системи, що містять ряд основних ланок (рис. 2.1):

Рис. 2.1 Структурна схема замкненої системи
з перетворювачем електричної енергії
ЗП - задавальний пристрій, що служить для завдання вхідного керуючого сигналу, який повинен бути відпрацьований системою; П - перетворювач, що здійснює функції посилення сигналу і перетворення параметрів електричної енергії відповідно до сигналів, що поступають з ЗП та датчика (Д); Н - навантаження (двигун, електролізна ванна, радіоелектронна апаратура) ; Д - датчик, служить для вимірювання і перетворення фізичного параметра, який регулюється системою, в інший фізичний параметр, зручний для подальшої обробки (звичайно всі величини, що вимірюються перетворюються в еквівалентну їм величину напруги); РіСУ - регулятор і система управління, служать для обробки сигналу, що знімається з Д і ЗП, і утворення сигналів управління перетворювачем.
Системи з перетворювачами електричної енергії класифікуються за принципом перетворення і обробки сигналів в перетворювачі, навантаженні, датчику, регуляторі та системі управління і можуть бути лінійними і нелінійними, безперервними і дискретними. Наявність в системі автоматичного регулювання такої специфічної ланки, як перетворювач, зумовлює те, що переважна більшість подібних систем відноситься до нелінійних дискретних систем (рис. 2.2).

Рис. 2.2 Класифікація за принципом обробки сигналів
До лінійних безперервних систем можна віднести системи з компенсаційними безперервними стабілізаторами при роботі регулюючого елемента в режимі малого сигналу. Якщо регулюючий елемент такого стабілізатора працює в режимі великого сигналу, то система відноситься до безперервних нелінійних. В усіх інших перетворювачах (керованих випрямлячах, регульованих інверторах, широтно-імпульсних регуляторах постійної і змінної напруги, перетворювачах частоти) діапазон зміни напруги (струму) обмежений і зверху, і знизу, а електрична енергія перетворюється дискретним способом, оскільки визначається ключовим характером роботи вентилів.
Крім перетворювача на процес обробки інформаційних сигналів системи багато в чому впливають побудова і принцип роботи РіСУ. За принципом організації роботи системи перетворювальної техніки розподіляються таким чином: звичайні, що мають постійну структуру контуру регулювання і постійний або змінний оператором задавальний вплив; програмовані, які мають постійну структуру і жорстку програму роботи, виконання якої зумовлене внутрішніми або зовнішніми командами ЗП і командами РіСУ; адаптовані, які можуть змінювати структуру системи, і програми, що виконуються по командах, що виробляються ЗП і РіСУ в залежності від зміни різних внутрішніх і зовнішніх чинників, забезпечуючи найкращий для даних умов алгоритм роботи.
Розглянемо елементи системи управління, призначені для забезпечення роботи керованих випрямлячів (КВ), автономних інверторів (АІ), широтно-імпульсних перетворювачів (ШІП) та перетворювачів частоти (ПЧ).
Дискретний характер роботи перетворювача зумовлює дискретний характер перетворення керуючого сигналу СУ. У перетворювальній техніці керуючий сигнал на виході СУ являє собою послідовність імпульсів, при формуванні якої використовується часо-імпульсна модуляція у вигляді широтно-імпульсної модуляції (ШІМ), частотно-імпульсной модуляції (ЧІМ), фазо-імпульсної модуляції (ФІМ). Велике поширення отримали імпульсні модуляції першого (ІМ-I) та другого (ІМ-II) роду.
Системи управління перетворювачами будуються одно- і багатоканальними. Багатоканальна система управління застосовується, наприклад, для незалежного формування сигналу управління по окремих фазах багатофазного перетворювача. У одноканальній системі управління керуючий сигнал формується в одному каналі для всіх фаз перетворювача.
Внаслідок того що основні вузли СУ і відповідно рівняння, що застосовуються для розрахунку процесів, які протікають в замкнених системах, характерні як для одноканальних, так і для багатоканальних систем управління, розглянемо їх на прикладі одноканальної системи (рис.2.3).

Рис. 2.3 Структурна схема одноканальної системи управління
Така система містить регулятор (Р), що описується в загальному випадку інтегро-диференціальними рівняннями, обмежувач діапазону регулювання (ОДР), який задає в системі рівнянь обмеження на верхні та нижні рівні зміни кута регулювання, значення якого отримується з виходу фазозсуваючого пристрою (ФЗП). Рівняння, що описує роботу ФЗП залежать від вигляду і роду часу-імпульсної модуляції, що реалізується. Розподільник імпульсів (РІ) встановлює однозначний зв'язок між номером інтервалу всередині періоду повторюваності і номером (фазою) керованого вентиля, на який подається імпульс управління. Пристрій синхронізації (ПС) і пристрій погоджування кутів управління (ППК) забезпечують часове узгодження роботи елементів системи управління і силових вентилів. Крім вказаних елементів, призначених для інформаційної обробки сигналів, система управління включає в себе різні пристрої захисту від перенапруг і надструмів, плавного запуску, повторного автоматичного включення і інші елементи автоматики.
Відповідно до основних функціональних
елементів, приведених на рис.2.3,
головними ознаками класифікації, що найбільш істотно відображають відмінності в структурі побудови СУ і відповідно
методах формування керуючих сигналів, є:
тип регулятора, способи синхронізації,
формування кута управління ФЗП,
і розподілу вихідних ![]() імпульсів.
імпульсів.
Конкретна реалізація тих або інших способів формування керуючого сигналу визначає особливості роботи СУ. Тип регулятора багато в чому визначає динамічні властивості всієї системи.
Найбільш поширеними є такі регулятори: пропорційний (П), інтегральний (І), ізодромний (ПІ) і диференціальний (Д), який застосовується спільно з іншими регуляторами. Схемна реалізація і рівняння, що описують процеси в цих регуляторах, приведені в табл.2.1.
Таблиця 2.1
|
В
стовпчиках вказано: тип регулятора, схему регулятора, передаточну функцію |
|||
|
П |
І |
ПІ |
Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|







де τ – тривалість імпульсу, що отримується з ФЗП
2.2. Класифікація основних способів синхронізації
Класифікація основних
способів синхронізації, що
застосовуються в перетворювальній техніці, приведені
на рис.2.4. Синхроімпульси можуть формуватися безпосередньо з напруги
мережі ![]() , частота якої або
кратна їй є опорною частотою роботи
системи і за допомогою автономного генератора, керованого по частоті.
, частота якої або
кратна їй є опорною частотою роботи
системи і за допомогою автономного генератора, керованого по частоті.
Рис. 2.4 Основні способи синхронізації.
Безпосередня
синхронізація може здійснюватися
двома способами. Перший полягає в
формуванні синхроімпульсів, жорстко
прив'язаних до конкретного значення миттєвої напруги
мережі ![]() (жорстка
синхронізація).
(жорстка
синхронізація).
У другому способі безпосередньої синхронізації використовується інтегрування деякої допоміжної напруги (інтегральна синхронізація). Напруга мережі використовується в цьому випадку як керівна.
Спосіб з автоналагодженням частоти потребує генератора, частота якого залежить від керуючого впливу.
Істотною ознакою, що багато в чому визначає вигляд структурної схеми СУ, є спосіб розподілу вихідних імпульсів.
За принципом організації синхронізації, розподільники діляться на два класи:
· залежні, алгоритми комутації в яких задаються за допомогою багатофазної послідовності опорних напруг;
· автономні, алгоритми комутації яких не пов'язані з опорними напругами.
За виглядом перетворення мережевих напруг залежні розподільники можуть являти собою:
· пристрої з безпосередньою комутацією мережевими напругами в заданій послідовності;
· з попереднім перетворенням мережевих напруг в двійковий код.
По діапазону розподілу РІ діляться на:
·
розподільники з обмеженим діапазоном розподілу ![]() ;
;
· розподільники з повним діапазоном розподілу.
Автономні розподільники можуть виконуватися у вигляді кільцевих перелічувальних схем, а також автогенераторів, синхронізованих задавальним генератором.
2.3. Фазозсувні пристрої
Фазозсувні пристрої, що визначають властивості системи в цілому, структуру системи управління і вигляд математичної моделі всього пристрою діляться:
1. за способом формування фазового зсуву на асинхронні і синхронні;
2. за формою представлення інформації на аналогові і цифрові;
3. за способом перетворення сигналу при синхронному способі формування фазового зсуву на розгортуючі і інтегральні, які в свою чергу можуть бути реалізовані на схемах з однократним, послідовним, безперервно-дискретним і параметричним фазовим зсувом.
У синхронних
ФЗП фазовий зсув ![]() відлічується
від опорних моментів
відлічується
від опорних моментів ![]() , що періодично повторюються
, що періодично повторюються  , тобто
моментів синхронізації (рис.2.5, а). Фазовий зсув імпульсу управління,
що виробляється таким ФЗП, визначається з виразу
, тобто
моментів синхронізації (рис.2.5, а). Фазовий зсув імпульсу управління,
що виробляється таким ФЗП, визначається з виразу
![]() ,
,
де ![]() регульований кут управління
для n-го інтервалу роботи
перетворювача;
регульований кут управління
для n-го інтервалу роботи
перетворювача; ![]() ;
; ![]() функція цілої частини числа.
функція цілої частини числа.
У асинхронному
ФЗП для початку відліку фазового зсуву ![]() ,
що формується на n-му інтервалі, використовується момент початку
формування імпульсу управління,
сформованого на (n-1)-му інтервалі (рис. 2.5, б).
,
що формується на n-му інтервалі, використовується момент початку
формування імпульсу управління,
сформованого на (n-1)-му інтервалі (рис. 2.5, б).
Рис. 2.5 Діаграми відліку імпульсів керування:
а) для синхронного способу; б) для асинхронного способу.
Фазове положення
імпульсу n-го інтервалу визначається з
виразу ![]() .
Оскільки при асинхронному способі формування кутів управління
інформація про опорні моменти
.
Оскільки при асинхронному способі формування кутів управління
інформація про опорні моменти ![]() не використовується, для
забезпечення нормальної роботи всієї
системи при великих сигналах управління необхідне узгодження зміни кутів з опорними моментами. Для цих цілей
служить блок ППК (див. рис.2.3), який фіксує моменти
не використовується, для
забезпечення нормальної роботи всієї
системи при великих сигналах управління необхідне узгодження зміни кутів з опорними моментами. Для цих цілей
служить блок ППК (див. рис.2.3), який фіксує моменти ![]() , обмежуючи
діапазон зміни часового положення
імпульсів управління межами початку і кінця того періоду, в якому він
може з'явитися.
, обмежуючи
діапазон зміни часового положення
імпульсів управління межами початку і кінця того періоду, в якому він
може з'явитися.
Таким чином, при асинхронному способі формування імпульсу управління змінюється відстань між черговими імпульсами, тобто здійснюється ЧІM, а при синхронному способі формування - ШІМ.
1. Вказати види систем з перетворювачами електричної енергії.
2. Навести структурну схему замкненої системи з перетворювачем електричної енергії
3. Вказати типи системи управління перетворювачами.
4. Відмінності між одно- та багатоканальними системами управління перетворювачами.
5. Навести структурну схему одноканальної системи управління.
7. Назвати основні способи синхронізації.
8. Засоби здійснення безпосередньої синхронізації.
9. За якими параметрами діляться фазозсувні пристрої, що визначають властивості системи.
РОЗДІЛ 3. МОДЕЛІ СИСТЕМ УПРАВЛІННЯ
3.1. Моделі систем керування з ШІМ-І.
При імпульсній модуляції першого роду величина модульованого параметра (часове положення ![]() імпульсу управління на періоді роботи перетворювача) визначається вихідним керуючим сигналом
імпульсу управління на періоді роботи перетворювача) визначається вихідним керуючим сигналом ![]() ,
обчисленим або виміряним в заздалегідь задані фіксовані моменти часу. Рівняння для визначення параметра, що
модулюється має вигляд
,
обчисленим або виміряним в заздалегідь задані фіксовані моменти часу. Рівняння для визначення параметра, що
модулюється має вигляд
![]()
![]() . (3.1)
. (3.1)
З розв’язку рівняння (3.1) визначається один
або декілька коренів ![]() ; де
; де ![]() фіксований
момент часу,
фіксований
момент часу, ![]() .
.
Рівняння виду (1.12) можуть вирішуватися відносно параметра, що модулюється, як явно, так і бути трансцендентними. Загальним виглядом математичної моделі ШІМ-І, яка дає можливість обчислити модульований параметр в явному вигляді, є поліноміальна модель
![]()
![]()
![]() (3.2)
(3.2)
Поліноміальні коефіцієнти ![]() визначаються в задані моменти
визначаються в задані моменти ![]() значенням
сигналу
значенням
сигналу ![]() . Вибір модульованого параметра
може відповідати як мінімальному кореню рівняння (3.2), так і іншим кореням.
. Вибір модульованого параметра
може відповідати як мінімальному кореню рівняння (3.2), так і іншим кореням.
На практиці найбільш широке поширення знайшли рівняння виду (3.2) першого ступеня. Можливі варіанти реалізації ШІМ–І, що описуються рівнянням першого ступеня (3.2), наведені в табл. 3.1.
Таблиця 3.1
|
Номер по порядку |
Часова діаграма ШІМ-І |
Рівняння ШІМ-І |
|
1 |
2 |
3 |
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
Продовження таблиці 3.1 |
||
|
1 |
2 |
3 |
|
5 |
|
|





Наприклад, структурна схема реалізації ШІМ–І, що відповідає, п.4. табл.3.1, наведена на рис. 3.1.

Рис. 3.1 Структурна схема реалізації ШІМ-І
В моменти часу ![]() система пам’яті (СП)
запам’ятовує значення напруги
система пам’яті (СП)
запам’ятовує значення напруги ![]() . Напруга величиною
. Напруга величиною ![]() потрапляє
на неінвертуючий вхід (1) компаратора (К), а на інший вхід (2) потрапляє
напруга з генератора пилоподібної напруги (ГПН). Так як кут нахилу
потрапляє
на неінвертуючий вхід (1) компаратора (К), а на інший вхід (2) потрапляє
напруга з генератора пилоподібної напруги (ГПН). Так як кут нахилу ![]() напруги
ГПН відомий, то значення
напруги
ГПН відомий, то значення ![]() однозначно визначає величину
однозначно визначає величину ![]() , що
видно з побудови трикутника (
, що
видно з побудови трикутника (![]() ) п.4., табл.3.1. Подібні схемні
рішення використовуються й до інших способів формування величини
) п.4., табл.3.1. Подібні схемні
рішення використовуються й до інших способів формування величини ![]() наведених
в табл.3.1.
наведених
в табл.3.1.
Як опорні функції можуть використовуватись
синусоїдні та експоненціальні функції. Наприклад, якщо тривалість імпульсу визначається з умови виконання рівності між постійною
функцією та деякою синусоїдальною
функцією, початкова фаза якої ![]() залежить від напруги
залежить від напруги ![]() , наведеною на рис.
3.2, а, тобто:
, наведеною на рис.
3.2, а, тобто:
![]()
![]()
![]()
то підставивши допоміжну опорну напругу ![]() і визначивши з виразу
і визначивши з виразу
![]() отримуємо,
що:
отримуємо,
що:

![]() або
або ![]() .
.

Рис. 3.2 Діаграми формування відліку часового положення імпульсів керування:
а) при синусоїдальній опорній напрузі; б) при експоненційній опорній напрузі.
При використанні експоненціальних функцій для визначення модульованого параметра необхідно вирішувати трансцендентні рівняння. Наприклад, якщо тривалість модульованого параметра визначається порівнянням опорної функції
![]()
![]()
з функцією
![]()
![]()
то модульований параметр визначається з розв’язку трансцендентного рівняння (рис. 3.2,б)
![]()
![]() .
.
Однак це рівняння складене на основі
конкретного значення функції управління,
зафіксованого в конкретний момент часу
![]() .
.
При реалізації багатоканального способу регулювання інтервал, на якому визначається модульований параметр знаходиться з виразу
![]()
де ![]() число каналів формування
імпульсів управління,
число каналів формування
імпульсів управління, ![]() номер
каналу.
номер
каналу.
Крім однократної ШІМ, при якій модульований параметр визначався одним з коренів рівняння (3.2), на практиці часто зустрічається багатократна імпульсна модуляція, при якій модульований параметр на періоді проходження вихідної напруги (струму) перетворювача визначається декількома або всіма коренями рівняння (3.1).
Наприклад, при
формуванні синусоїдальної вихідної напруги
перетворювача за допомогою ШІМ-І (рис.3.3)
необхідно визначити всі корені рівняння вигляду
![]()
![]() , (
, (![]() число
інтервалів пилоподібної напруги, що
складають період Т вихідної напруги).
число
інтервалів пилоподібної напруги, що
складають період Т вихідної напруги).

Рис. 3.3 Формування часового положення імпульсів керування
за синусоїдальною напругою.
Якщо
приймати період ![]() (рис.3.3) як основний, то при такому підході модуляція, що розглядається зводиться до раніше показаної
і більш простої модуляції (див. табл. 3.1, п.5).
Тому в залежності від вибраного періоду, відносно якого визначається корінь
рівняння (3.1) і число імпульсів управління,
що формуються на цьому періоді, визначають або один, або декілька, або
всі корені рівняння (3.1).
(рис.3.3) як основний, то при такому підході модуляція, що розглядається зводиться до раніше показаної
і більш простої модуляції (див. табл. 3.1, п.5).
Тому в залежності від вибраного періоду, відносно якого визначається корінь
рівняння (3.1) і число імпульсів управління,
що формуються на цьому періоді, визначають або один, або декілька, або
всі корені рівняння (3.1).
Таким чином, математична модель ШІМ-І зводиться до опису деякою функцією
опорного сигналу ![]() опису сигналу, один з
параметрів якого є функцією сигналу управління
опису сигналу, один з
параметрів якого є функцією сигналу управління
![]() обчисленому
в заздалегідь відомий фіксований момент часу
обчисленому
в заздалегідь відомий фіксований момент часу ![]() та визначення одного або декількох
вибраних з коренів рівняння вигляду (3.1). Знайдений корінь визначає величину модульованого параметра на
та визначення одного або декількох
вибраних з коренів рівняння вигляду (3.1). Знайдений корінь визначає величину модульованого параметра на ![]() му
періоді роботи перетворювача.
му
періоді роботи перетворювача.
3.2. Моделі систем управління з ШІМ-II.
При імпульсній модуляції другого роду величина параметра, що модулюється на ![]() му періоді роботи перетворювача визначається як
результат розв’язку функціонального
рівняння
му періоді роботи перетворювача визначається як
результат розв’язку функціонального
рівняння
![]()
![]()
![]() ,
(3.3)
,
(3.3)
де ![]() один
з коренів рівняння (3.3),
один
з коренів рівняння (3.3), ![]() опорна
функція.
опорна
функція.
При реалізації ШІМ-II в перетворювальній техніці знайшли поширення два способи, що визначаються рівняннями:

Спосіб, що реалізується відповідно до рівняння (3.4), отримав назву вертикальний
спосіб управління, або розгортаючий, а спосіб, що реалізується відповідно до рівняння (3.5) – спосіб управління з накопиченням сигналу помилки, або інтегральний. Функція ![]() у виразі (3.4) являє собою розгортувальну пилкоподібну, гармонічну або експонентну напругу.
у виразі (3.4) являє собою розгортувальну пилкоподібну, гармонічну або експонентну напругу.
Можливі варіанти реалізації розгортаючого способу отримання часового положення імпульсу управління і відповідні рівняння приведені в табл.3.2.
Таблиця 3.2
|
Номер по порядку |
Часова діаграма ШІМ-II |
Рівняння ШІМ-II |
|
1 |
|
|
|
2 |
|
|


Схемна реалізація способу, що наведений в п.1. табл. 3.2 приведена на рис. 3.4.

Рис. 3.4 Схемна реалізація розгортаючого способу.
На входи 1 і 2
компаратора К потрапляють сигнали ![]() та
та ![]() . В
моменти рівності цих сигналів на виході компаратора стрибкоподібно змінюється
амплітуда напруги, яка залежить від схеми компаратора та величини живлячої
напруги і в подальшому з періодом Т формується послідовність імпульсів
тривалістю
. В
моменти рівності цих сигналів на виході компаратора стрибкоподібно змінюється
амплітуда напруги, яка залежить від схеми компаратора та величини живлячої
напруги і в подальшому з періодом Т формується послідовність імпульсів
тривалістю ![]() .
.
При побудові
СУ перетворювачами застосовується
також спосіб, що отримав назву горизонтального. Суть його полягає в тому, що
напруга мережі або інша гармонічна напруга
![]() ,
поступає на фазозсувну схему, параметр одного
з елементів якої залежить від напруги управління
,
поступає на фазозсувну схему, параметр одного
з елементів якої залежить від напруги управління
![]() .
.
Приклад такої схеми приведений на рис.3.5, а. Векторні діаграми на рис.3.5, б
ілюструють отримання необхідного фазового зсуву,
а часова діаграма на рис.3.5, в ілюструє зміщення у часі між вхідною
напругою ![]() і вихідною напругою
і вихідною напругою ![]() . Фаза
напруги управління залежить як від значення опору
. Фаза
напруги управління залежить як від значення опору ![]() , так і від значення
індуктивності
, так і від значення
індуктивності ![]() , які в подібних схемах повинні
бути змінними.
, які в подібних схемах повинні
бути змінними.

Рис. 3.5 Горизонтальний спосіб керування: а) схема пристрою;
б) векторна діаграма; в)часові діаграми
Точка перетину напруги
![]()
де ![]() поточне значення фазного кута,
що залежить від
поточне значення фазного кута,
що залежить від ![]() , з напругою
, з напругою ![]() (рис.3.5, в) визначає
часове положення імпульсу управління. Оскільки напругу
(рис.3.5, в) визначає
часове положення імпульсу управління. Оскільки напругу ![]() можливо представити у вигляді
можливо представити у вигляді ![]() (
(![]() фіксований кут), то часове положення імпульсу керування
визначається з виразу:
фіксований кут), то часове положення імпульсу керування
визначається з виразу:
![]() ,
,
у якому права частина представляє розгортаючу лінійну функцію. Таким чином, математична модель горизонтального способу керування відповідає ШІМ-II розгортаючого типу.
При аналізі процесів у системах, що реалізують
ШІМ-II інтегруючого типу, необхідно враховувати ту особливість, що опорна функція
![]() може
бути постійною, тому що в цьому випадку роль розгортаючої напруги виконує
сигнал
може
бути постійною, тому що в цьому випадку роль розгортаючої напруги виконує
сигнал  . Інтегрування на кожнім періоді
починається з нульовими початковими умовами інтегратора.
. Інтегрування на кожнім періоді
починається з нульовими початковими умовами інтегратора.
У випадках, коли зміна ![]() незначна,
керування ШІМ-II можна звести до рівнянь ШІМ-I. Дійсно, представивши
незначна,
керування ШІМ-II можна звести до рівнянь ШІМ-I. Дійсно, представивши ![]() у
виді ряду Тейлора щодо точки
у
виді ряду Тейлора щодо точки ![]() , одержимо
, одержимо
![]()
Тоді, обмеживши першим членом ряду Тейлора (нульове наближення), прийдемо до рівнянь ШІМ-I, наведеним у п.4 і 5 табл. 3.1. Якщо обмежитися двома першими членами розкладання (перше наближення), те прийдемо до рівнянь ШІМ-I, представленими в п. п. 1-3 табл. 3.1.
Застосування таких моделей спрощує аналіз, але призводить до
появи помилки ![]() на інтервалі
на інтервалі ![]() , яка дорівнює
залишковому члену ряду Тейлора. При врахуванні двох перших членів помилка
становить
, яка дорівнює
залишковому члену ряду Тейлора. При врахуванні двох перших членів помилка
становить
 .
.
Видно, що при лінійній зміні ![]() модель
ШІМ-II точно збігається з моделлю ШІМ-I. Як і у випадку із ШІМ-II, розрахунки
багатократної ШІМ-II можна провести складанням рівняння для періоду
повторюваності опорної функції
модель
ШІМ-II точно збігається з моделлю ШІМ-I. Як і у випадку із ШІМ-II, розрахунки
багатократної ШІМ-II можна провести складанням рівняння для періоду
повторюваності опорної функції ![]() . Таким чином, розрахунки при
реалізації ШІМ-II зводиться до визначення миттєвих значень
. Таким чином, розрахунки при
реалізації ШІМ-II зводиться до визначення миттєвих значень ![]() ,
, ![]() ,
складанню, розв’язанню та вибору одного чи декількох коренів обраних рівнянь.
,
складанню, розв’язанню та вибору одного чи декількох коренів обраних рівнянь.
3.3. Моделі систем керування з АсШІМ.
В асинхронних ФСП
здійснюється ЧІМ, а кут керування ![]() відраховується від моменту появи
імпульсу керування попереднього інтервалу. При реалізації ЧІМ період
проходження імпульсів керування визначається з рівняння
відраховується від моменту появи
імпульсу керування попереднього інтервалу. При реалізації ЧІМ період
проходження імпульсів керування визначається з рівняння
![]()
![]()
![]()
 ,
(3.6)
,
(3.6)
де ![]() період проходження імпульсів на
період проходження імпульсів на ![]() му
інтервалі (рис. 2.5, б).
му
інтервалі (рис. 2.5, б).
Якщо припустити, що рівняння (3.6) можна
розв’язати щодо періоду ![]() у явному виді і записати, що
у явному виді і записати, що ![]() ,
то, з урахуванням
,
то, з урахуванням ![]() , одержуємо
, одержуємо
 ,
,
що вказує на те, що керування в АсШІМ ведеться з урахуванням інтеграла від сигналу керування і, отже, таке керування має властивості, подібні до властивостей астатичної системи першого порядку.
Структурна схема
асинхронної СІФК за умови, що ![]() постійна напруга, показаний на
рис. 3.6, а, а часові діаграми керування роботою двотактного однофазного
керованого випрямляча — на рис. 3.6, б. Ключ S1 підключає
конденсатор С до джерела U0, із забезпеченням лінійного
заряду
постійна напруга, показаний на
рис. 3.6, а, а часові діаграми керування роботою двотактного однофазного
керованого випрямляча — на рис. 3.6, б. Ключ S1 підключає
конденсатор С до джерела U0, із забезпеченням лінійного
заряду ![]() конденсатора С3, а ключ S2
підключає конденсатор С3 на вхід компаратора А. На другий
вхід компаратора подається постійна напруга керування
конденсатора С3, а ключ S2
підключає конденсатор С3 на вхід компаратора А. На другий
вхід компаратора подається постійна напруга керування ![]() . Моменти
перетинання напруг
. Моменти
перетинання напруг ![]() і
і ![]() визначають
часове положення імпульсів керування
визначають
часове положення імпульсів керування ![]() .
.
Припустімо, що в момент ![]() у системі діє
збурення, що відповідає зменшенню вихідної напруги випрямляча
у системі діє
збурення, що відповідає зменшенню вихідної напруги випрямляча ![]() на
на ![]() , і
з'являється помилка
, і
з'являється помилка ![]() . Тоді на
. Тоді на ![]() му періоді
відбувається зміна часового положення кута керування
му періоді
відбувається зміна часового положення кута керування ![]() . Період
проходження імпульсів керування зменшується:
. Період
проходження імпульсів керування зменшується: ![]() . Випрямлена
напруга
. Випрямлена
напруга ![]() зростає,
зростає, ![]() стає рівним
нулю і система приходить у сталий стан. Період проходження імпульсів керування
стає таким, яким він був до збурення
стає рівним
нулю і система приходить у сталий стан. Період проходження імпульсів керування
стає таким, яким він був до збурення ![]() , а часове положення імпульсів
керування відносно початку періоду випрямленої напруги
, а часове положення імпульсів
керування відносно початку періоду випрямленої напруги ![]() змінюється.
змінюється.

Рис. 3.6 Структурна схема а) та часові діаграми б), що ілюструють реалізацію АсШІМ.
Однією з особливостей асинхронних систем є те, що період проходження імпульсів може бути отриманий будь-якої тривалості. Отже, потрібний спеціальний пристрій для обмеження діапазону зміни кутів керування. Цю роль виконують ППК (рис.2.3). У вихідній напрузі перетворювача моменти, що визначають період проходження імпульсів цієї напруги, жорстко фіксовані, а часовий інтервал появи кожного імпульсу керування обмежений одним періодом.
Приклади рівняння і часові діаграми, що відбивають процеси, які відбуваються при деяких видах АсШІМ, наведені в табл. 3.3.
Таблиця 3.3
|
№п.п |
Часова діаграма |
Рівняння |
Вид модуляції |
|
1 |
|
|
ЧІМ-І |
|
2 |
|
|
ЧІМ-ІІ |



Способи формування імпульсів керування, що
наведені в п.1, табл. 3.3, відносяться до ЧІМ-І і засновані на
формуванні і порівнянні лінійної напруги з деяким постійним рівнем, причому
нахил лінійної напруги ![]() постійний, а змінюється рівень
напруги
постійний, а змінюється рівень
напруги ![]() , з яким напруга
, з яким напруга ![]() порівнюється.
У п. 2 табл. 3.3 наведений випадок, що відповідає ЧІМ-ІІ. Загалом, процес
формування кута керування при АсШІМ може бути описаний рівняннями, подібними тим,
що наведені в табл. 3.2 і 3.3, з урахуванням тієї основної особливості, що
початок відліку для кожного наступного інтервалу збігається з моментом
формування імпульсу керування попереднього інтервалу. При побудові систем
керування можливо спільне застосування синхронних і асинхронних способів ШІМ, а
також побудова таких систем, у яких здійснюється параметрична чи стрибкоподібна
зміна параметрів рівнянь (3.1), (3.3.) і (3.6), що описують розглянуті види
ШІМ.
порівнюється.
У п. 2 табл. 3.3 наведений випадок, що відповідає ЧІМ-ІІ. Загалом, процес
формування кута керування при АсШІМ може бути описаний рівняннями, подібними тим,
що наведені в табл. 3.2 і 3.3, з урахуванням тієї основної особливості, що
початок відліку для кожного наступного інтервалу збігається з моментом
формування імпульсу керування попереднього інтервалу. При побудові систем
керування можливо спільне застосування синхронних і асинхронних способів ШІМ, а
також побудова таких систем, у яких здійснюється параметрична чи стрибкоподібна
зміна параметрів рівнянь (3.1), (3.3.) і (3.6), що описують розглянуті види
ШІМ.
Вибір того чи іншого способу фазового зсуву обумовлений конкретною задачею, що повинна вирішувати система автоматичного регулювання й керування разом із перетворювачем.
3.4. Особливості побудови цифрових систем керування.
В цифрових системах керування реалізуються
способи формування ШІМ, розглянуті в попередніх параграфах. Однак зміна
сигналів керування ![]() і опорного
і опорного ![]() у таких
системах відбувається дискретно з інтервалом
у таких
системах відбувається дискретно з інтервалом
![]() ,
,
де ![]() ціле число інтервалів
ціле число інтервалів ![]() , що
складають період Т вихідної напруги.
, що
складають період Т вихідної напруги.
При такому представленні аргументу рівняння (3.1), (3.3.) і (3.6) приймуть вигляд
![]() ,
, ![]() ;
; ![]() ; (3.7)
; (3.7)
![]() ,
, ![]() ;
; ![]() ;
(3.8)
;
(3.8)
![]() ,
, ![]() ;
; ![]() , (3.9)
, (3.9)
де ![]() корінь рівняння.
корінь рівняння.
Найбільш широке
застосування знаходять СК, які побудовані на основі кодо-
і частотно-імпульсного перетворень. Принцип роботи систем
із кодоімпульсним перетворенням полягає в представленні на першому такті роботи
(![]() )
напруги керування
)
напруги керування ![]() (рис.3.7) у вигляді двійкового
коду з наступним занесенням цього коду в регістр. Надалі можливі наступні
варіанти перетворення даного коду в часовий інтервал:
(рис.3.7) у вигляді двійкового
коду з наступним занесенням цього коду в регістр. Надалі можливі наступні
варіанти перетворення даного коду в часовий інтервал:
1. поступове заповнення лічильника імпульсів від тактового генератора й порівняння кодів регістра й лічильника (крива 1 на рис.3.7);
2.
заповнення лічильника від тактового генератора
(крива 2 на рис.3.7), починаючи із значення ![]() до остаточного
заповнення;
до остаточного
заповнення;
3. поступове обнуління лічильника (крива 3 на рис.3.7). Моменти порівняння, заповнення, обнуління кодів визначають часове положення імпульсу керування відповідно до рівняння (3.9), що описує ШІМ-I.

Рис. 3.7 Діаграми зміни рівня сигналу при кодоімпульсній модуляції
При реалізації частотно-імпульсного перетворення проводиться
заповнення або обнуління лічильника імпульсами, частота ![]() , проходження
яких однозначно визначається напругою керування. Попередньо лічильник може
заповнюватися, наприклад, імпульсами генератора стабільної тактової частоти
, проходження
яких однозначно визначається напругою керування. Попередньо лічильник може
заповнюватися, наприклад, імпульсами генератора стабільної тактової частоти ![]() . Якщо
частота
. Якщо
частота ![]() змінюється в залежності від
миттєвих значень напруги керування, то така система реалізує ШІМ-II інтегрального типу.
змінюється в залежності від
миттєвих значень напруги керування, то така система реалізує ШІМ-II інтегрального типу.
Частотно-імпульсний спосіб перетворення можна
реалізувати на базі керованого дільника частоти, через який імпульси тактового
генератора подаються на заповнення або обнуління лічильника. Якщо коефіцієнт
ділення встановлюється на початку кожного періоду пропорційним значенню ![]() ,
то в системі реалізується ШІМ-I.
,
то в системі реалізується ШІМ-I.
Якщо коефіцієнт розподілу безперервно
змінюється в залежності від ![]() ,
, ![]() , то реалізується
ШІМ-II.
, то реалізується
ШІМ-II.
На основі схеми цифро-аналогового перетворювача (ЦАП) слідкуючого типу може бути реалізована система з ШІМ-II розгортаючого типу (рис. 3.8).

Рис. 3.8 Структурна схема реалізації ШІМ-ІІ
У цій схемі імпульси, що надходять з
генератора (Г), послідовно заповнюють лічильник (Ліч), а код, що
знімається з його виходу, перетворюється ЦАП в аналогову величину, момент
порівняння якої з напругою ![]() визначає часове положення
імпульсу керування.
визначає часове положення
імпульсу керування.
3.5. Особливості побудови мікропроцесорних систем керування
Відмінними рисами МП СК перетворювачами є висока гнучкість, обумовлена можливостями програмної реалізації керування. Остання дозволяє реалізувати за допомогою однієї і тієї ж СК різні закони регулювання без яких-небудь змін у принциповій схемі тільки за рахунок зміни керуючих програм, по яких МП обробляє цифрові коди. Взаємна відповідність між величинами, функціональними блоками і перетворювальними операціями для аналогових, цифрових і мікропроцесорних систем керування наведена в табл. 3.4.
Таблиця 3.4.
|
|
Аналогові ФСП |
Цифрові ФСП |
МП ФСП |
|
1 |
Рівень електричного сигналу |
Частота електричного сигналу |
Цифровий код |
|
2 |
Напруга порівняння |
Повна ємність чи лічильника задане число імпульсів |
Цифровий код |
|
3 |
Джерело напруги, що порівнює |
Генератор частоти, регістр. |
Осередок ЗП чи регістра МП |
|
4 |
ЗП |
Схема порівняння кодів чи схема задавання і порівняння кодів |
Команда порівняння цифрових кодів, що зберігаються в ЗП чи в регістрах МП (CPM r, CMP m) |
|
5 |
Дільник напруги |
Дільник частоти |
Програмна затримка даних у МП |
|
6 |
Інтегратор + схема порівняння |
Лічильник імпульсів |
Підпрограма інтегрування і команди порівняння цифрових кодів |
|
7 |
Запам'ятовування миттєвого значення напруги інтегратора за допомогою пристрою вибрання-збереження та подача його на суматор |
Перенос числа з одного лічильника імпульсів на інший лічильник (регістр) |
Команда введення даних з ІОП (інтерфейсу обчислювальних пристроїв) у регістри МП |
Оскільки МП СК є цифровими, процеси розрахунку часового положення імпульсу керування описуються рівняннями (3.7)-(3.9). Найбільше поширення серед МП СК одержали системи, що реалізують ШІМ-I, у відповідності до рівняння (3.7). Це викликано тим, що функції дільника частоти, лічильника імпульсів, схеми порівняння кодів, що виконує МП (табл. 3.4), а точніше, його арифметико-логічний пристрій, для ШІМ-І виконується найбільш просто.
Для реалізації ШІМ-II необхідно паралельно вести формування опорних сигналів, відслідковувати зміну керуючих сигналів і порівнювати їх, тому реалізація на МП таких способів є більш складною.
Мікропроцесор в СК обчислює значення ![]() по
рівнянню (3.7). Однак унаслідок обмеженої швидкості обчислень воно може бути
визначене за час
по
рівнянню (3.7). Однак унаслідок обмеженої швидкості обчислень воно може бути
визначене за час ![]() , що є співрозмірним з
, що є співрозмірним з ![]() .
Тому рівняння (3.7) перетвориться до виду
.
Тому рівняння (3.7) перетвориться до виду
![]() (3.10)
(3.10)
 .
.
де ![]() час обчислень положення імпульсу
керування.
час обчислень положення імпульсу
керування.
Кінцевий час обчислень може служити джерелом
додаткової погрішності СК. Значення ![]() може бути відпрацьовано системою
точно, але із запізнюванням на один такт регулювання, що погіршує динамічні
властивості системи.
може бути відпрацьовано системою
точно, але із запізнюванням на один такт регулювання, що погіршує динамічні
властивості системи.
До задач виконуваних мікропроцесорними системами можна віднести традиційні та такі, що можуть бути реалізовані тільки на базі МП.
До традиційних задач відносяться:
1. регулювання;
2. стабілізації;
3. реалізація функцій регуляторів (пропорційного (П), пропорційно-інтегрального (ПІ), пропорційно-інтегрально-диференційного (ПІД);
4. формування сигналів керування напівпровідниковими елементами;
5. розподілу;
6. синхронізації з мережею або задавальним генератором;
7. задачі формування сигналів з імпульсною модуляцією.
До задач, що можуть бути реалізовані тільки на базі МП, тобто такими, що не вирішуються традиційними системами керування є задачі:
1. виконання функцій обчислювального модуля в колі зворотного зв’язку перетворювача;
2. обчислення та зміни параметрів регулятора у комбінованих системах керування;
3. діагностика стану перетворювачів та навантаження;
4. виявлення передаварійних станів;
5. реалізація ресурсозберігаючого керування;
6. узгоджене мультимікропроцесорне керування перетворювачами у складі електротехнічних об’єктів;
7. прийом та передача сигналів керування іншими мікропроцесорними системами або ПК вищого рівня ієрархії або іншими системами того ж рівня;
8. організація зв’язку з оператором (підключення клавіатури, індикаторів, дисплеїв, зумерів).
Мікропроцесорні системи переважають системи керування на жорсткій логіці за гнучкістю, тобто можливості керування шляхом модифікації програмного забезпечення та можливістю вирішення специфічних задач.
Обмеження реалізації мікропроцесорних
алгоритмів за часом, який визначається частотою переключення вентилів
перетворювача, а також внесення затримки в коло зворотного зв’язку
перетворювача та наявність дискретизації за рівнем керуючого впливу, що
відображено на характеристиці ![]() (рис. 3.9), перетворює лінійну
характеристику керування на нелінійну. Це негативно впливає на показники
стійкості, керованості та спостереження. Наприклад, область стійкої роботи
широтно-імпульсного перетворювача з ПІ регулятором на базі 8-розрядного
мікропроцесора зменшується майже в три рази. Зі збільшенням розрядності
мікропроцесора негативний вплив дискретизації значно зменшується і при
реалізації ПІ-регулятора на 16-розрядних мікропроцесорах вплив дискретизації
практично відсутній.
(рис. 3.9), перетворює лінійну
характеристику керування на нелінійну. Це негативно впливає на показники
стійкості, керованості та спостереження. Наприклад, область стійкої роботи
широтно-імпульсного перетворювача з ПІ регулятором на базі 8-розрядного
мікропроцесора зменшується майже в три рази. Зі збільшенням розрядності
мікропроцесора негативний вплив дискретизації значно зменшується і при
реалізації ПІ-регулятора на 16-розрядних мікропроцесорах вплив дискретизації
практично відсутній.
Рис. 3.9 Дискретизація за рівнем керуючого впливу
Особливістю розробки мікропроцесорних систем керування напівпровідниковими перетворювачами є необхідність системного підходу до проектування системи в цілому. Розробка апаратної частини мікропроцесорної системи, як правило, не є складною, оскільки система будується за жорстко заданими принципами магістральності та модульності. Найбільш трудомістким є етап проектування програмного забезпечення, який вимагає від розробників схем знання програмування.
Вибір мікропроцесору визначається вимогами по швидкодії в залежності від частоти роботи перетворювача, обсягу обчислень при виробленні керуючого впливу, необхідними апаратними ресурсами мікропроцесора або мікроконтролера (наявністю вбудованих АЦП, мультиплексорів, компараторів, ШІМ, таймерів, регістрів захоплення подій, інтерфейсів зв’язку та кількості ліній портів для введення-виведення сигналів).
Типова схема мікропроцесорної системи керування напівпровідниковим перетворювачем наведена на рис.3.10, де позначено: МК – мікроконтролер, ПС – пристрій синхронізації, ККІ – контролер клавіатури та індикації, К – ключі або комутатори, УП – узгоджуючі пристрої з гальванічною розв’язкою, ДАС – датчики аварійних ситуацій, НП – напівпровідниковий перетворювач.

Рис. 3.10 Типова схема мікропроцесорної системи керування
напівпровідниковим перетворювачем
Схема на рис. 3.10 відображає приклад організації взаємодії МК з об’єктом керування (НП), оператором шляхом використання клавіатури та індикації, іншими мікроконтролерними (МК) системами та персональним комп’ютером (ПК):
1.
Для введення/виведення статичних цифрових сигналів
використовують лінії ![]() ,
, ![]() .
.
2. Для виведення імпульсних сигналів використовують виходи Р8, які за допомогою драйверів та гальванічної розв’язки взаємодіють з НП;
3.
Для введення/виведення аналогових сигналів використовують
вбудовані АЦП та ЦАП входи/виходи, які позначені на рис.3.10 як ![]() ,
, ![]() . Для
формування
. Для
формування ![]() часто використовують PWM-виводи
формування аналогових сигналів;
часто використовують PWM-виводи
формування аналогових сигналів;
4. Зв’язок з оператором здійснюється шляхом виведення інформації на дисплей, введення даних з клавіатури.
5. Міжпроцесорний обмін (з іншими мікропроцесорними системами або ПК) через виводи UART (універсальний асинхронний прийомо-передавач).
1. Навести структурну схему реалізації ШІМ–І.
2. Вказати рівняння для вертикального способу управління (розгортаючий).
3. Вказати рівняння для способу управління з накопиченням сигналу помилки (інтегральний).
4. Навести схему реалізації розгортаючого способу.
5. В чому заключається горизонтальний спосіб управління?
6. Навести схемну реалізацію горизонтального способу управління.
8. Навести структурну схему асинхронної СІФК.
9. Якої тривалості може бути період проходження імпульсів в асинхронній системі?
10. Який спеціальний пристрій використовується для обмеження діапазону зміни кутів керування?
11. В чому полягає принцип роботи систем із кодоімпульсним перетворенням?
12. В чому полягає принцип роботи систем з частотно-імпульсним перетворенням?
13. Реалізувати ШІМ-ІІ на основі схеми цифро-аналогового перетворювача (ЦАП) слідкуючого типу.
14. Які переваги є у МП СК порівняно з аналоговими та цифровими системами керування.
15. Типи задач виконувані мікропроцесорними системами керування.
16. Що відносять до традиційних задач керування?
17. Що відносять до специфічних задач керування?
18. Від яких вимог залежить вибір мікропроцесору для системи керування?
РОЗДІЛ 4. ІНТЕГРАЛЬНІ МІКРОСХЕМИ СИСТЕМ УПРАВЛІННЯ ТА ДРАЙВЕРІВ
4.1. Контролери ШІМ
Для стабілізації вихідних параметрів перетворювачів електричної енергії (напруга, струм) часто використовують ШІМ-контролери. Багато фірм пропонують на ринку ШІМ-контролери в інтегральному виконанні, які поєднують високий ступінь точності роботи, простоту використання й низьку вартість.
Розрізняють наступні типи ШІМ-контролерів:
· зі зворотним зв’язком по напрузі;
· зі зворотним зв’язком по струму;
· резонансні контролери;
· інтегровані ШІМ модулятори в мікропроцесорах.
Розглянемо побудову систем із ШІМ-стабілізацією на прикладі контролера TL494 фірми Motorola та ШІМ-контролера UC3875.
4.1.1. ШІМ-контролер TL494
Основні технічні характеристики:
· широкий набір функцій ШІМ-керування;
· вихідний струм кожного виходу, що втікає або витікає.....200 мА;
· можливість роботи у двотактному або однотактному режимі;
· вбудована схема придушення здвоєних імпульсів;
· широкий діапазон регулювання;
·
вихідна опорна напруга...………………………………......![]() ;
;
· можливість організації простої синхронізації.
Спеціально створені для побудови імпульсних джерел електроживлення (ІДЕЖ), мікросхеми TL493/4/5 забезпечують розробнику розширені можливості при конструюванні схем керування ІДЕЖ. Структурна схема контролера ШІМ-контролера TL494 наведена на рис. 4.1.
Рис. 4.1 Структурна схема ШІМ-контролера TL494
ШІМ-контролери TL493/4/5 містять у собі підсилювач помилки, вбудований регульований генератор, компаратор регулювання „мертвого” часу, тригер керування, прецизійне джерело опорної напруги (ДОН) на 5В і схему керування вихідним каскадом. Підсилювач помилки видає синфазну напругу в діапазоні від -0,3...(Vcc-2) В. Компаратор регулювання „мертвого” часу має постійний зсув, що обмежує мінімальну тривалість „мертвого” часу величиною порядку 5%.
Допускається синхронізація вбудованого генератора, за допомогою підключення виводу R до виходу опорної напруги й подачі вхідної пилкоподібної напруги на вивід С, що використається при синхронній роботі декількох схем ІДЕЖ.
Незалежні вихідні формувачі на транзисторах забезпечують можливість роботи вихідного каскаду за схемою із загальним емітером або за схемою емітерного повторювача. Вихідний каскад мікросхем TL493/4/5 може працювати в однотактному або двотактному режимі. Вибір режиму реалізовано за допомогою сигналів, що подаються на спеціальний вхід ОТС (Output Control). Вбудована схема контролює кожний вихід і забороняє видачу здвоєного імпульсу у двотактному режимі роботи.
Мікросхеми, що мають суфікс L, гарантують нормальну роботу в діапазоні температур -25...85ºС, із суфіксом С гарантують нормальну роботу в діапазоні температур 0...70 ºС.
Мікросхема TL494 представляє із себе ШІМ - контролер імпульсного джерела живлення, що працює на фіксованій частоті. Вбудований генератор пилкоподібної напруги потребує для установки частоти тільки двох зовнішніх компонентів резистора R і конденсатора С. Частота генератора визначається за формулою:
![]() .
.
Модуляція ширини вихідних імпульсів досягається порівнянням позитивної пилкоподібної напруги з двома керуючими сигналами (див. часову діаграму рис.4.2 ).

Рис. 4.2 Часові діаграми роботи ШІМ-контролера TL494
Логічні елементи „АБО – НІ” передають сигнали керування на відкривання вихідних транзисторів Q1 і Q2 тоді, коли сигнал тактування вбудованого тригера має низький логічний рівень. Це відбувається протягом часу, коли амплітуда пилкоподібної напруги більша за амплітуди керуючих сигналів. Під керуючими сигналами розуміються напруги вироблені схемою регулювання „мертвого” часу (вивід DTC), підсилювачі помилки з колом зворотного зв'язку (вивід FB).
Отже збільшення амплітуди керуючих сигналів викликає відповідне зменшення ширини вихідних імпульсів. Вхід компаратора регулювання „мертвого” часу має зсув 120мВ, що обмежує мінімальний „мертвий” час на виході першими 4% тривалості циклу пилоподібної напруги. У результаті, максимальна тривалість робочого циклу становить 96% у тому випадку, якщо вивід ОTC заземлений і 48% у тому випадку, якщо на вивід ОTC подана опорна напруга.
Збільшити тривалість „мертвого” часу на виході, можна подаючи на вхід регулювання „мертвого” часу (вивід DTC) постійну напругу в діапазоні 0..3,3 В. ШІМ - компаратор регулює ширину вихідних імпульсів від максимального значення, обумовленого входом регулювання „мертвого” часу, до нуля, коли напруга зворотного зв'язку змінюється від 0,5 до 3,5 В.
Обидва підсилювачі помилки мають вхідний діапазон синфазного сигналу від -0,3 до (Vcc-2,0) В і можуть використовуватись для зчитування значень напруги або струму з виходу джерела живлення. Виходи підсилювачів помилки мають активний високий рівень напруги й об’єднані функцією АБО на неінвертуючому вході ШІМ - компаратора. У такій конфігурації підсилювач, що вимагає меншої тривалості вихідних імпульсів керування, є домінуючим у колі керування. Під час розряду конденсатора С на виході компаратора регулювання мертвого часу генерується позитивний імпульс, що тактує тригер і блокує вихідні транзистори Q1 і Q2. Якщо на вхід вибору режиму роботи подається опорна напруга (вивід ОTC), тригер безпосередньо управляє двома вихідними транзисторами у протифазі (двотактний режим), а вихідна частота дорівнює половині частоти генератора. Вихідний формувач може також працювати в однотактному режимі, коли обидва транзистора відкриваються й закриваються одночасно і коли потрібен максимальний робочий цикл, в якому тривалість відкритого стану не перевищує 50%. Це бажано, коли трансформатор має обмотку з обмежувальним діодом, використовуваним для придушення перехідних процесів. Якщо в однотактному режимі потрібні більші струми, вихідні транзистори можуть працювати паралельно. Для цього потрібно замкнути на землю вхід вибору режиму роботи ОТС, що блокує вихідний сигнал від тригера. Вихідна частота в цьому випадку буде дорівнювати частоті генератора.
Мікросхема TL494 має вбудоване джерело опорної напруги на 5 В, здатне забезпечити витікаючий струм, до 10мА для зсуву зовнішніх компонентів схеми. Опорна напруга має похибку 5% у діапазоні робочих температур від 0 до 70º С.
Призначення виводів корпуса контролера зображені на рис. 4.3.
Рис. 4.3 Маркування виводів корпуса контролера TL494
Призначення виводів мікросхеми TL494:
·
![]() - інвертуючі входи підсилювачів
помилки;
- інвертуючі входи підсилювачів
помилки;
· IN1, IN2 - неінвертуючі входи підсилювачів помилки;
· FB – вхід зворотного зв’язку;
· С – вхід для підключення конденсатора генератора;
· R – вхід для підключення резистора генератора;
· GND – загальний вивід („земля”);
· С1 – колектор 1-го транзистора;
· Vref – вхід напруги опорного джерела живлення;
· ОТС – вхід вибору режиму;
· Vcc - вхід напруги живлення;
· С2 – колектор 2-го транзистора;
· Е2 – емітер 2-го транзистора;
· Е1 – емітер 1-го транзистора.
4.1.2. ШІМ – контролер UC3875/6/7/8
Основні технічні характеристики:
· регулювання тривалості робочого циклу.......0-100%;
· програмована затримка включення виходів;
· можливість роботи з зворотним зв’язком по напрузі і струму;
· вихідний струм кожного каскаду..........2 А;
· смуга пропускання підсилювача помилки........10 МГц;
· схема блокування при зниженні напруги живлення;
· низький струм запуску................150 мкА;
· регульована опорна напруга.
Сімейство мікросхем, об’єднаних під назвою UC3875 призначено для керування потужним мостовим каскадом за допомогою зсуву по фазі моменту переключення однієї половини моста відносно іншої. Використовується ШІМ сумісно з резонансними методами і переключенням при нульовій напрузі для підвищення ефективності імпульсних джерел живлення (ІДЖ) на високих частотах. Мікросхеми цього сімейства можуть застосовуватись в схемах керування ІДЖ зі зворотним зв’язком як по напрузі, так і по струму. Також вони мають вбудовану схему захисту від надмірних струмів.
Забезпечується програмована часова затримка для установки “забороненого часу” при включенні кожного вихідного каскаду. Ця затримка забезпечує час для роботи в резонансному режимі і являється незалежно керованою для кожної пари виходів (A-B, C-D).
Структурна схема ШІМ – контролера UC3875 зображена на рис.4.4 й містить наступні основні блоки.
Схема м’якого пуску і захисту за струмом
Схема контролю аварійних станів забезпечує два способи виключення:
· повне вимикання всіх чотирьох вихідних потужних каскадів;
· фіксація нульового зсуву фази імпульсів керування.
Повне вимикання задається схемою струмового захисту, схемою блокування чи зниженням напруги живлення. Коли напруга на виводі SS досягає величини нижньої порогової напруги, то починається процес перемикання на виході і у той же час зсув фаз збільшується від нуля до номінального значення з постійної часу, яка обумовлена ємністю на виводі SS. Схема контролю аварійних станів усуває режиму "ікання" (періодичне повторне включення).
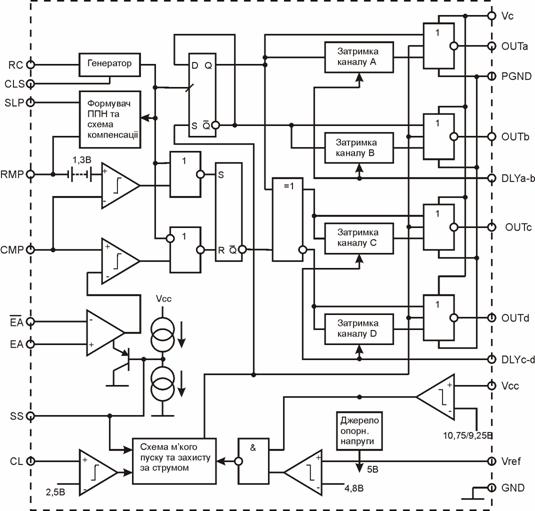
Рис. 4.4 Структурна схема ШІМ – контролера UC3875
Високочастотний генератор може перебувати або в режимі незалежних коливань або в режимі зовнішньої синхронізації. При роботі в режимі незалежних коливань частота встановлюється за допомогою зовнішнього резистора й конденсатора, які підключаються поміж виводом RC та виводом GND (загальний).
Схеми затримки включення виходів і вихідних каскадів
У кожному з вихідних каскадів чотири транзистори утворюють швидкодіючий квазі-комплементарний вихідний формувач, що може пропускати втікаючий або витікаючий струм з піковим значенням більше, ніж 1А і загальною затримкою приблизно 30 нс. Для гарантованого збереження низького рівня на виході при увімкненні напруги живлення ще три транзистори утворюють самозміщений формувач, який втримує транзистор, підключений через емітер до виводу PGND, відкритим до моменту, коли напруга живлення досягне порогу включення. Ця схема працює, навіть коли відсутня напруга живлення VCC. Транзистор підключений через емітер до виводу PGND також відкривається сигналом від схеми контролю аварійних станів і зберігає низький рівень на виході.
Затримка включення виходів, що забезпечує "заборонений час", реалізована за допомогою ємності, яка повинна розрядитися до напруги VTH перш, ніж напруга на виходах почне наростати. Час затримки визначається джерелами струму (1I1 і 2I1), які встановлюються зовнішнім резистором. Напруга на виводах установки затримки DLY внутрішньо стабілізується на рівні 2,5В. Діапазон установки "забороненого часу" дорівнює 50...200нс.
Формувач пилкоподібної напруги і схема компенсації
Генератор пилкоподібної напруги може використатися в одному з наступних режимів керування:
· режим зі зворотним зв'язком по напрузі;
· режим з випереджальним зворотним зв'язком по напрузі;
· режим зі зворотним зв'язком по струму;
· режим зі зворотним зв'язком по струму й компенсацією нахилу пилкоподібної напруги.
Режим зі зворотним зв'язком по напрузі
досягається простим підключенням резистора ![]() між виводами
між виводами ![]() й
SLP. Режим з випереджальним зворотним зв'язком по напрузі досягається
підключенням резистора
й
SLP. Режим з випереджальним зворотним зв'язком по напрузі досягається
підключенням резистора ![]() між вихідною клемою джерела
живлення й виводом SLP мікросхеми UC3875. Зміна пилкоподібної напруги в режимі
зі зворотним зв'язком по напрузі описується виразом:
між вихідною клемою джерела
живлення й виводом SLP мікросхеми UC3875. Зміна пилкоподібної напруги в режимі
зі зворотним зв'язком по напрузі описується виразом: ![]() .
.
У режимі зі зворотним зв'язком по струму генератор пилкоподібної напруги може бути відключений заземленням виводу SLP і використанням виводу RMP як прямого входу зчитування струму ШІМ- компаратора.
Зміни пилкоподібної напруги в режимі зі
зворотним зв'язком по струму й компенсацією нахилу пилкоподібної напруги
описується виразом: ![]() .
.
Вигляд DIP-корпусу контролера UC3875 зображено на рис. 4.5.

Рис. 4.5 DIP-корпус контролера UC3875
Призначення виводів мікросхеми:
· Vref – напруга опорного джерела живлення
· CMP – вхід підсилювача помилки
·
![]() - інвертуючий вхід підсилювача
помилки
- інвертуючий вхід підсилювача
помилки
· EA - неінвертуючий вхід підсилювача помилки
· CL – неінвертуючий вхід компаратора
· SS – вивід для забезпечення м’якого запуску
· DLYc-d – встановлення затримки включення виходів
· OUTd – вихід D
· OUTc – вихід C
· Vc - напруга живлення вихідних ключів
· Vcc - напруга живлення
· PGND – потужна земля
· OUTb – вихід B
· OUTa – вихід A
· DLYa-b – встановлення затримки включення виходів
· RC - вивід установки частоти генератора
· CLS - вихід тактових імпульсів
· SLP – установка нахилу пилоподібної напруги
· RMP – вхід пилоподібної напруги
· GND - сигнальна земля
4.2. Драйвери для MOSFET і IGBT транзисторів
Драйвери – це мікросхеми, які призначені для керування силовими ключами пристроїв енергетичної електроніки. Вони використовуються як проміжна ланка між схемою керування (контролером або цифровим сигнальним процесором) і потужними виконавчими елементами. Їх використання дозволяє порівняно легко забезпечити керування MOSFET і IGBT транзисторами на високих частотах. Наведемо класифікацію даних пристроїв.
1. По положенню керованого транзистора:
· драйвер нижнього плеча;
· драйвер верхнього плеча;
2. По кількості керованих транзисторів:
· одиночні драйвери;
· драйвери півмоста;
· драйвери трифазного моста.
3. По робочих напругах:
· низьковольтні до 500¸600 В;
· високовольтні до 1200 В.
4. По струмовій здатності:
· низькі рівні струмів (до 200 мА);
· високі рівні струмів (до 2 А).
5. Драйвери електронних баластів.
6. Контролери вторинних джерел живлення.
7. Інтелектуальні силові ключі.
8. Спеціалізовані типи мікросхем.
9. Драйвери з гальванічною розв’язкою.
Розглянемо основні характеристики й особливості застосування на прикладі драйверів, що випускаються фірмою International Rectifier (IR). Драйвери, які випускає IR призначені для роботи в будь-яких конфігураціях силових каскадів у діапазоні потужності до 3-5 кВт. У табл.4.1 представлені основні типи драйверів виробництва IR.
Таблиця 4.1
|
Тип драйвера |
Призначення |
Напруга, В |
Струм вкл./викл., А |
tdon/off, нс |
|
Примітка |
|
IR2117 |
Драйвер верхнього плеча |
600 |
0,2/0,42 |
125/105 |
– |
UVLO |
|
IR2128 |
Драйвер верхнього плеча інвертуючий |
600 |
0,2/0,42 |
200/150 |
- |
OCP, UVLO |
|
IR1210 |
Здвоєний драйвер нижнього плеча |
6–20 |
1,5/1,5 |
85/65 |
- |
|
|
IR2105 |
Драйвер півмоста з одним входом |
600 |
0,13/0,27 |
680/150 |
0,5 |
SD, UVLO |
|
IR2108 |
Незалежний драйвер верхнього й нижнього плеча півмоста |
600 |
0,12/0,25 |
180/180 |
0,5 |
SD, UVLO |
|
IR2151 |
Автоколивальний драйвер півмоста |
600 |
0,1/0,21 |
- |
1,2 |
Шпаруватість 50% |
|
IR2130 |
Драйвер трифазного моста |
600 |
0,2/0,42 |
675/425 |
2,5 |
OCP, UVLO |
![]() (deadtіme)
час затримки між включенням транзисторів верхнього й нижнього плеча для
виключення наскрізних струмів. Цей час становить від 0,2 до 2 мкс для різних
модифікацій;
(deadtіme)
час затримки між включенням транзисторів верхнього й нижнього плеча для
виключення наскрізних струмів. Цей час становить від 0,2 до 2 мкс для різних
модифікацій;
tdon/off — час затримки включення/вимикання драйвера;
ОСР (Over Current Protection) - захист від перевантаження по струму. Визначає піковий струм стоку(колектору) в кожен робочий період при якому відключає вихід генератора;
UVLO (Under Voltage LockOut) - захист від спадання напруги керування. Схема контролю UVLO стежить за всіма напругами, які подаються на модуль або виробляються вбудованим конвертором DC/DC. При зменшенні кожного з них нижче заданого порогу, відключаються силові транзистори й видається сигнал несправності. Звичайно має рівень спрацьовування 8-11 В;
SD (Shut Down) - вхід відключення, який призначений для відключення вихідних сигналів;
SSD (Soft Shut Down) - «плавне» відключення транзисторів у режимі перевантаження. Вимикання транзисторів відбувається не миттєво, а по заданій траєкторії, яка формується схемою плавного відключення SSD. Такий режим необхідний для виключення перенапруг, що виникають при різкому запиранні транзисторів.
До схеми керування затвором пред'являються наступні вимоги:
· напруга затвора при відмиканні повинна бути на 10-15 В вище напруги стоку MOSFET (колектора IGBT), тобто для транзистора верхнього плеча напруга керування повинна бути на 10-15 В вище напруги шини живлення.
· драйвер повинен керуватися логічним сигналом, зв'язаним із сигнальною шиною загального проводу, відповідно драйвер верхнього плеча повинен мати високовольтний каскад зміщення рівня.
· потужність, що розсіюється схемою керування, повинна бути дуже малою в порівнянні із загальною потужністю розсіювання.
· схема керування повинна забезпечувати струми перезаряду ланцюга затвора, що гарантують динамічні характеристики транзистора.
4.2.1. Мікросхема ІR2101
Розглянемо роботу драйверів на прикладі мікросхеми ІR2101 фірми Іnternetіonal Rectіfіer. Типова схема включення мікросхеми ІR2101 і її структурна схема зображені на рис.4.6 та рис. 4.7 відповідно.

Рис. 4.6 Типова схема включення мікросхеми ІR2101
Рис. 4.7 Структурна схема мікросхеми ІR2101
Опис виводів мікросхеми ІR2101 наведений у табл.4.2.
Таблиця 4.2
|
HIN |
Логічний вхід для завдання у противофазі виходу драйвера верхнього рівня (HO) |
|
LIN |
Логічний вхід для завдання у противофазі виходу драйвера нижнього рівня (LO) |
|
VCC |
Живлення логіки й драйвера нижнього рівня |
|
VB |
Живлення верхнього рівня |
|
HO |
Виходи драйверів верхнього рівня |
|
VS |
Повернення живлення верхнього рівня |
|
LO |
Виходи драйверів нижнього рівня |
|
СОМ |
Повернення живлення нижнього рівня |
Драйвер містить дві схеми запуску затвора польового транзистора, причому в даній мікросхемі керування півмостом застосоване "плаваюче" джерело напруги. Суть його полягає в наступному. Якщо верхній транзистор відкритий стійки півмоста відкритий, то потенціал на його витоку близький до напруги живлення - максимальній напрузі в схемі. При цьому для керування верхнім транзистором стійки, на його затвор треба подавати напругу більшу за напругу джерела живлення. Для того, щоб подати на затвор напругу вище максимальної, ця напруга знімається із зовнішньої ємності, що служить джерелом живлення для керування затвором верхнього транзистора півмоста. Ця ємність заряджається під час відкритого стану нижнього транзистора по колу: джерело живлення драйвера - діод - ємність - нижній транзистор - земля. При цьому накопичений заряд віддається в коло затвора верхнього транзистора в моменти, коли потрібно його відкрити. З керуванням нижнім транзистором стійки проблем не виникає, тому що на нього необхідно подавати напругу відносно загальної землі.
У випадку якщо час відкритого стану нижнього транзистора малий або знижується напруга живлення мікросхеми, спрацюють схеми захисту від зниженої напруги й драйвер відключиться, при цьому транзистори виявляться в закритому стані до відновлення нормальних умов роботи драйвера.
У такий спосіб з мінімумом зовнішніх елементів можна організувати керування півмостом на польових транзисторах. При цьому параметри включення/вимикання задаються зовнішніми резисторами, включеними в кола затворів кожного транзистора.
Застосування даних мікросхем є доцільним практично у всіх випадках перетворювачів, побудованих на сучасних типах силових ключів (MOSFET і IGBT). При цьому забезпечується легкість конструювання й надійність роботи в порівнянні із системами керування на дискретних елементах.
4.2.2. Мікросхема ІR1110
Високотехнологічна аналогова мікросхема, розроблена для здійснення контролю швидкості наростання напруги або величини постійної напруги на шині постійного струму в одно або трьохфазних керованих випрямлячах.
· керування двигуном сталого струму;
· зарядні пристрої для акумуляторних батарей;
· джерела живлення сталого струму.
Основні технічні характеристики:
· замінює коштовні датчики струму, що побудовані на ефекті Хола і трансформаторах струму;
·
дозволяє здійснювати керування тиристорами;
макс. плаваюча напруга верхнього плеча –600В (1200В IR2271);
· вихідний сигнал – ШІМ, амплітуда 300мВ, частота 35 кГц;
· діапазон зміни шпаруватості ШІМ – (5-95)%;
· нелінійність характеристики – 0.5%;
· температурний дрейф – 30 мкВ/С;
· нелінійність температурного дрейфу – 0.001 %;
· широкий динамічний діапазон;
· повна похибка менше 1%;
· робочий діапазон температур навколишнього середовища -40 ÷ +125 0С;
· 3-х або однофазний вхід змінного струму;
· захист від короткого замикання;
· низьке енергоспоживання.
На рис.4.8 показано варіант застосування мікросхеми ІR1110 для здійснення керування трифазним мостовим випрямлячем (схема Ларіонова).

Рис. 4.8 Застосування мікросхеми ІR1110
для здійснення керування трифазним випрямлячем
На рис.4.9 зображена структурна схема мікросхеми IR1110. Вона включає в себе: блок нормалізації напруги, сторожовий таймер, інтегруючий формувач напруги, детектор втрати фази, інтегратор, два компаратора, генератор пилкоподібної напруги, підсилювач помилки сигналу, що поступає з VBUS REF шини, підсилювач сигналу, що поступає на генератор пилкоподібної напруги, блок формування частотної характеристики підсилювача помилки сигналу.
Драйвер отримує сигнали з ліній змінного струму А, В, С та шини постійного струму DC+, DC- і формує сигнали керування тиристорами напівкерованого випрямляча Ларіонова. В драйвері забезпечується контроль за наявністю фазових напруг. Окрім того драйвер визначає частотні характеристики каналу зворотного зв’язку, що забезпечує можливість зміни динамічних характеристик системи.
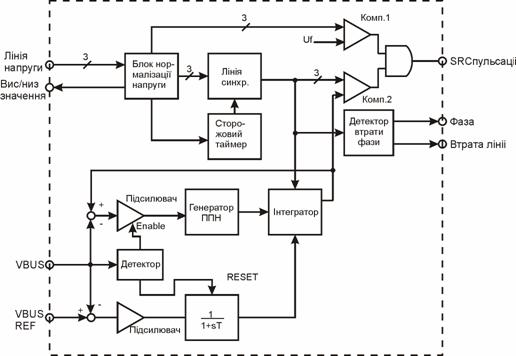
Рис. 4.9 Структурна схема мікросхеми IR1110
Блок нормалізації напруги кожної фази на підставі напруг на тиристорах формує додатню напівхвилю розгортаючої напруги та забезпечує запуск сторожового таймера, у момент досягнення сформованою напругою максимального значення. Інтегруючий формувач напруги забезпечує поєднання функцій блоків нормалізації та сторожового таймера. На рис.4.10 зображено об’єднану часову діаграму для трьох каналів вхідної напруги.
Інтегратор пропускає сигнал або з виходу генератора пилкоподібної напруги, або з виходу підсилювача напруги. У разі відсутності напруги на виході підсилювача помилки, вихідний сигнал визначається генератором пилкоподібної напруги. Часові параметри цієї напруги формуються за допомогою зовнішніх елементів. Це дає можливість реалізувати у керованому випрямлячі плавний запуск. У разі наявності вихідної напруги підсилювача помилки, вихідна напруга інтегратора (розгортаюча напруга) визначається цим підсилювачем. Підсилювач помилки підсилює різницю напруг опорного джерела живлення та вихідної напруги сталого струму керованого випрямляча.
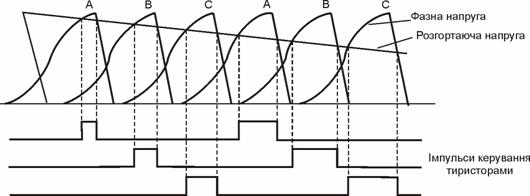
Рис. 4.10 Часові діаграми роботи каналу формування
імпульсів керування тиристорами
Для формування частотних характеристик
підсилювача у структурній схемі використовується блок формування частотної
характеристики підсилювача сигналу помилки (![]() ).
).
Компаратор (Комп2) служить для порівняння вихідних напруг інтегруючого формувача напруги та генератора опорної розгортаючої напруги, в результаті чого формуються імпульси керування тиристорами.
Для блокування формування вихідних імпульсів керування при малих значеннях розгортаючої напруги використано ще один компаратор (Комп1), який забезпечує дозвіл формування вихідних сигналів.
В схему введено детектор втрати фази, який визначає наявність фазових напруг та дає можливість конфігурувати випрямляч на однофазний режим роботи.
Граничні електричні характеристики мікросхеми IR1110 наведені у табл.4.3.
Таблиця 4.3

На рис.4.11 зображено корпус мікросхеми IR1110 з нумерацією виводів
Рис. 4.11 Корпус мікросхеми IR1110 з нумерацією виводів
Глосарій
електричний «вентиль» тобто прилад, що забезпечує односпрямовану передачу електричного сигналу. Його можна вважати некерованим ключем.
керований напівпровідниковий прилад, що може працювати в електронній схемі як у ключовому, так і підсилювальних режимах. Це універсальний напівпровідниковий прилад інтегральних та силових схем.
керований напівпровідниковий прилад, що використовується тільки в ключовому режимі насамперед у силових виконавчих пристроях.
різновид напівпровідникових діодів, призначених для роботи в швидкодіючих імпульсних схемах.
напівпровідниковий діод, на виводах якого напруга залишається майже постійною, при зміні в деяких межах величини електричного струму, що протікає в ньому.
напівпровідниковий діод, робота якого базується на залежності бар’єрної ємності переходу від зворотної напруги. Варикапи використовуються в якості елементів з електрично керованою ємністю в схемах перестройки частоти коливального контуру
напівпровідникові діоди, що застосовуються для перетворення змінного струму в пульсуючий і є основним компонентом блоків живлення.
названий на честь німецького фізика Baльтера Шотке — напівпровідниковий діод з малим падінням напруги при прямому включенні.
напівпровідниковий прилад, що має три p-n переходи, зовнішні виводи виконані лише від крайніх областей (p та n).
Повністю керований тиристор(GTO)
напівпровідниковий прилад, в основі якого лежить класична чотирьохшарова структура. Такий тиристор включають і виключають подачею позитивного й негативного імпульсів струму на електрод керування.
напівпровідниковий прилад, що складається із двох послідовних p-n-переходів, робота якого заснована на використанні двох типів носіїв заряду (електронів та дірок).
Польовий транзистор (ПТ)
напівпровідниковий прилад робота якого заснована на модуляції опору напівпровідникового матеріалу поперечним електричним полем. В них використовується ефект зміни величини області просторового заряду (ОПЗ). Польові транзистори діляться на два основні класи:
1. З керуючим p-n-переходом (ПТКП, англ. JFET);
2. Із структурою метал-діелектрик-напівпровдник (МДН, англ. MOSFET), у якій затвор ізольований від робочого напівпровідника діелектриком.
Біполярний транзистор з ізольованим затвором (БТІЗ, англ. IGBT)
повністю керований напівпровідниковий прилад, що є розвитком технології силових MOSFET і суміщає в своїй структурі потужний MOSFET-транзистор із наведеним каналом та вихідний біполярний каскад
Резистор (англ. resistor, від лат. Resisto – опираюсь)
пасивний елемент електричного кола, що в ідеалі характеризується лише опором електричному струму, тобто для ідеального резистора у любий момент має виконуватись закон Ома: миттєве значення напруги на резисторі пропорційне струму через нього.
прилади, величина опору яких змінюється механічним шляхом (потенціометри, реостати). До цієї групи відносять також підстроюванні резистори, величина яких встановлюється один раз в процесі налагодження електронного приладу.
це електричний опір, значення якого позначено на резисторі або вказано в нормативній документації і який є початковим значенням для відліку відхилень від цього значення.
найбільша потужність, яку резистор може розсіювати в заданих умовах на протязі гарантованого терміну роботи при параметрах, що задані допусками
система з двох або більше електродів (обкладок), що розділені діелектриком. Така система характеризується ємністю та здатна зберігати електричний заряд. Електричні конденсатори розділяють на дві великі групи:
1. силові, що використовуються в електротехнічних та електроенергетичних установках;
2. конденсатори, що використовуються в електронних та радіотехнічних приладах
окремий клас конденсаторів - електрохімічні прилади, призначені для зберігання електричної енергії. Вони характеризуються більшим числом циклів заряду/розряду, тривалим терміном служби, великою щільністю енергії, працюють незалежно від положення в просторі. Iонiстори використовуються в персональних комп'ютерах, телефонах, пейджерах, органайзерах, годинниках і аналогічних пристроях як резервне джерело живлення для підтримки пам'яті при заміні елементів живлення. Ще одна область застосування - накопичувачі енергії в автономних системах живлення на сонячних елементах і вітрових двигунах. Останнім часом намітилася тенденція до застосування iонiсторiв разом з акумуляторами в системах зі складним динамічним режимом споживання енергії для короткочасного живлення навантаження більшим струмом.
ємність, значення якої позначено на
конденсаторі або вказано в нормативно-технічній документації і є основою для
відліку допускного відхилення. Визначає заряд конденсатора залежно від напруги
на обкладках (![]() )
)
статичний електромагнітний пристрій, що перетворює змінний струм однієї напруги в змінний струм другої напруги дія якого, основана на принципі електромагнітної індукції.
Трансформатор, який застосовується для перетворення електричної енергії в електричних мережах і установках, призначених для прийому і використання електричної енергії. До силових відносяться трансформатори:
· трифазні і багатофазні потужністю 6,3 кВт і більше;
· однофазні потужністю 5 кВт і більше.
При менших потужностях трансформатори називаються трансформаторами малої потужності.
застосовують в радіоелектроніці для перетворення короткочасних сигналів з крутими фронтами, в основному прямокутних імпульсів тривалістю до долі мікросекунди. Основна вимога, що пред'являється до імпульсних трансформаторів, полягає в мінімальному спотворенні форми імпульсів і зниження тривалості їх фронтів.
Статичний електромагнітний пристрій, що використовується в електричних ланцюгах як індуктивний опір; широко застосовують в радіоелектронній, радіотехнічній і електротехнічній апаратурі. Розрізняють декілька різновидів дроселів:
1. дроселі змінного струму;
2. згладжувальні дроселі;
3. дроселі насичення.
використовують в якості баластних і струмообмежуючих опорів в ланках змінного струму. Вони також використовуються для отримання різних вольт-амперних характеристик вказаних ланок. Дросель змінного струму складається з замкненого магнітопроводу і обмотки
використовують для зменшення пульсацій. Згладжувальний дросель, як і дросель змінного струму, складається з замкненого магнітопроводу і однієї обмотки. Обмотка дроселя включається послідовно з навантаженням і по ній проходить випрямлений струм.
використовують в якості регульованих індуктивних опорів в ланках змінного струму. На відміну від дроселів змінного струму та згладжувальних дроселів, що мають тільки одну обмотку, дросель насичення має не менше двох обмоток.